Paso 1: Centro de tus servos
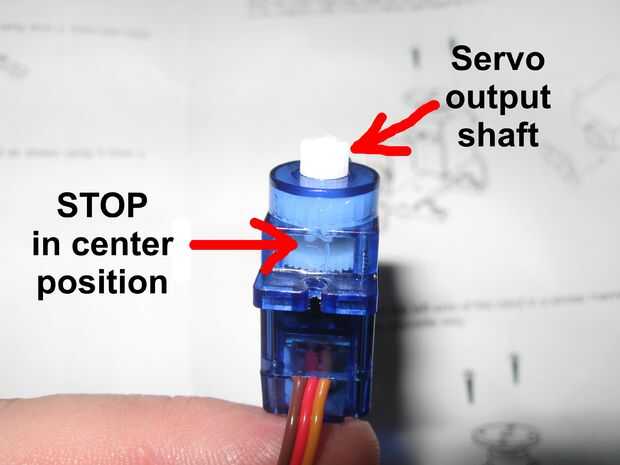
Cuando el servo está centrado físicamente se puede convertir la misma cantidad en cada dirección (aproximadamente 90 grados). Antes de comenzar verificación de conjunto que se centran todos los 10 de tus servos. Esta voluntad de ahorrar tiempo en pasos posteriores. Una vez que el robot está montado, la posición del centro de cada servo se puede refinar en el software si es necesario.













