Paso 23: Instalar el software
El controlador mago utiliza la interfaz de CP2102 IC. Dependiendo de su sistema operativo puede que necesite instalar los controladores. Puede descargar los controladores USB así como el programa de QuadBot cachorro de mi sitio de soporte .
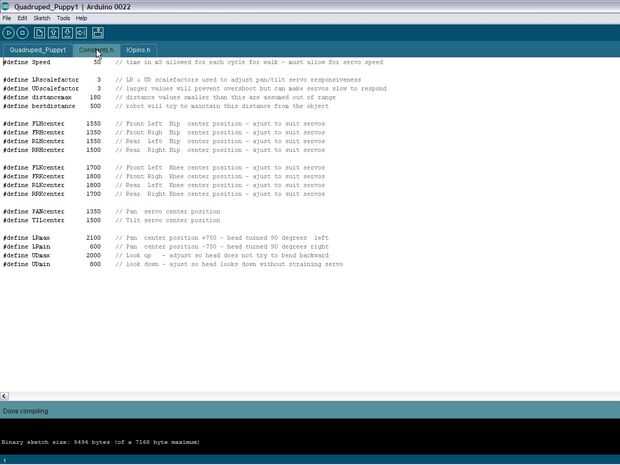
Una vez tienes el IDE de Arduino en ejecución, puede abrir el programa. Asegúrese de que tener la versión adecuada para las pilas que utilizan para que el robot será capaz de pararse sobre sus patas traseras. Usted verá que el código tiene una pestaña de constantes y una IO fija ficha.
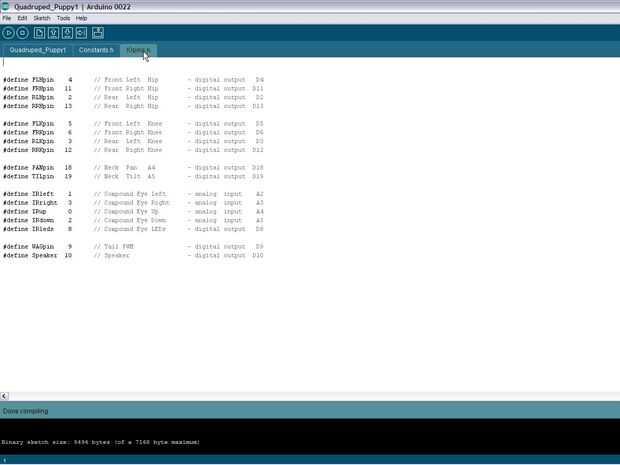
La ficha de constantes almacena valores tales como la posición del centro de servos. Esto es rápido y fácil a la consonancia fina su código. La pestaña de IOpins es como un mapa para su cableado. Te dice que dispositivo está conectado a qué pin.
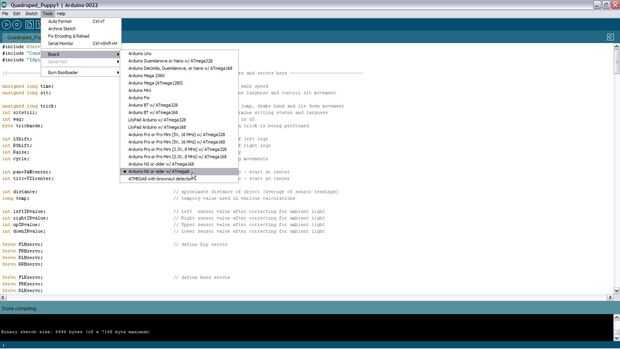
Ir al menú herramientas y seleccione el tipo de junta. El controlador mago es compatible con "Arduino NG o /w mayores ATmega8"
Ahora Conecte el cable USB. Después de unos segundos el ordenador debería detectar el interfaz del USB del controlador mago. Volver al menú herramientas y seleccione el puerto serie virtual de la USB.
Pulse el botón reset en el controlador y cargar el programa.













