Paso 3: Hacer el chasis.

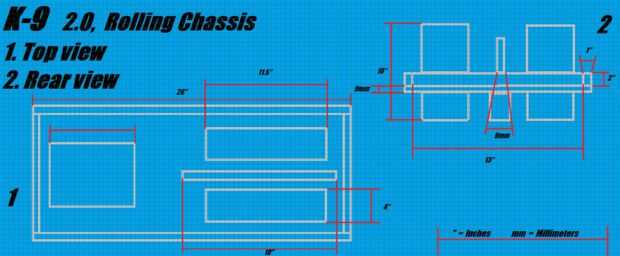














Partir de este punto, puede que desee hacer referencia a los planos y
Fotos de acompañamiento construcción para aclaración de medidas y difícil de explicar las áreas.
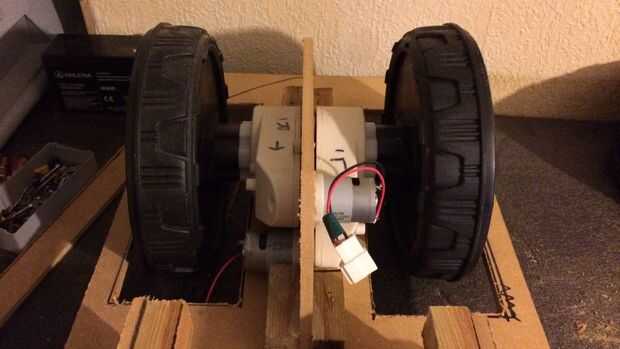
Por lo tanto, a partir de cero, a comenzar con el sistema de impulsión. I medir y cortar una hoja de MDF, marcado donde las ruedas y el volante delantero fueron a sentarse y a la Junta de transmisión y cortar con una sierra de calar. Luego, utilizando una paz más pequeñas de MDF, cortado a la medida, perforar un agujero para los motores para sentarse y otro agujero para el eje. I luego atornillados los motores a la Junta y ranurada la transmisión en el chasis y asegurado, seguido por el eje y colocar las ruedas. Entonces algunos paz pequeña de madera se cortaron y unida para hacer la sección de dirección. Las ruedas eran plástico así que no había mucha tracción. Para más de esto, utiliza un viejo neumático de bicicleta de montaña, cortado a la medida y cortado de las paredes del neumático, adjuntas a la rueda usando algunas tuercas y pernos. Esto les haría fácil de quitar si necesita cambiar y sentar la cabeza de los pernos en la base del neumático entre los peldaños para que no rocen con el suelo, sólo la banda de rodadura de neumático.
")




")







