Paso 2: Programación Kardbot
El microcontrolador nodemcu necesita ser programado para que el servo robot moverse y caminar.
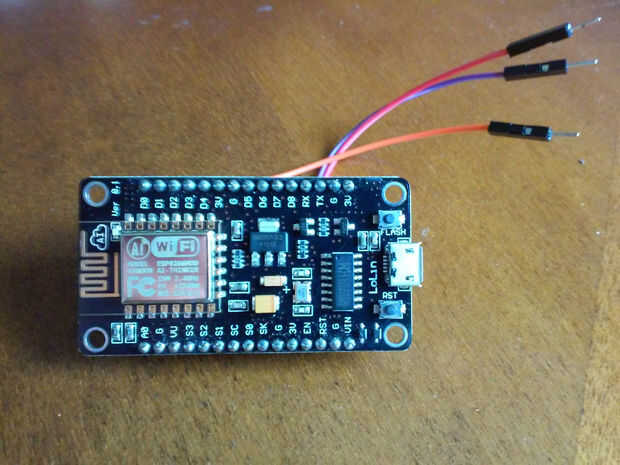
El nodemcu utilizado en este Instructables es un kill para este robot simple sin embargo la nodemcu es barato y puede utilizarse para la construcción de robots de avance. Sensores e incluso internet de cosas se pueden utilizar con el nodemcu.
Kardbot está programado usando Arduino gratis versión 1,6 f
El microcontrolador está conectado a un PC mediante el puerto micro usb y se carga el código a continuación.
Hay muchos buenos artículos en Instructables usando Arduino con nodemcu ESP8266.
Kardbot utiliza el código de programa de Instructables sitio https://www.arduino.cc/en/Main/Software. Algunas modificaciones fueron hechas en referencia a las patas del servo y el microcontrolador nodemcu de ESP8266.
Código:
#include
#include servo frontservo, backservo;
char hacia adelante [] = {60,100,100,100,100,60,60,60};
void setup()
{
frontservo.Attach(D2);
backservo.Attach(D4);
frontservo.Write(90); restablecer servo backservo.write(90); restablecer el servo
}
void loop()
{para (int n = 0; n < 4; n ++)
{frontservo.write(forward[2*n]);
backservo.Write(Forward[(2*n)+1]); Delay(300);
}
}