Paso 4: Cableado e instalación de componente
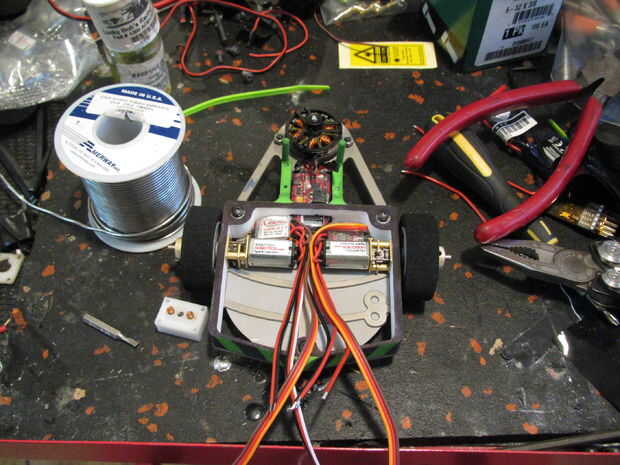


Los cables de alimentación todos ir a un solo conector JST como en este momento el "interruptor" es solo una desconexión mecánica. Esto es pronto para ser sustituido por un interruptor adecuado que permitirá a la batería a permanecer enchufado en todo momento y simplificar la potencia arriba y energía del proceso. Parte del proceso de instalación del interruptor de potencia será el acortamiento de los cables de pwm para hacer espacio para el interruptor y reducir el peso por un margen suficientemente grande para evitar que el robot va sobre el límite de peso de 150g.
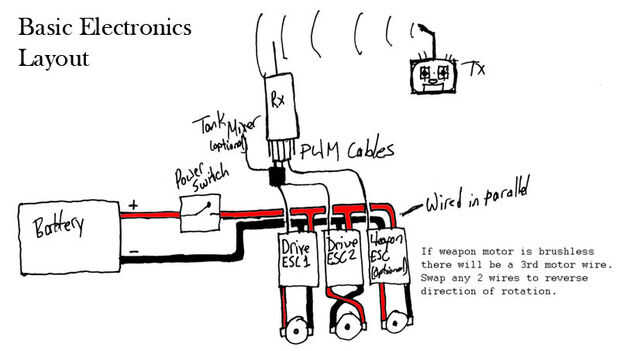
El diseño de la electrónica elaborado muestra la disposición eléctrica general. En el caso de Keres, mezcla se realiza en el transmisor para ahorrar peso y el motor de arma es sin escobillas, por lo tanto un tercer alambre está presente. (Nota, para invertir la dirección de la rotación en un brushless motor con una sola salida direccional usted simplemente intercambio cualquier motor dos plomos)





")

")





