Paso 4: Vamos a ver las matemáticas
En el código, el arduino lleva a veces se da y encuentra el tiempo que tardó el objeto viajar entre sensores. Da lo siguiente:
Delta t1 = t2-t1 Delta t2= t3-t2
Ya que tiene dos veces delta, y el arduino tiene los dos desplazamientos (x cm), el arduino puede calcular las velocidades promedio para los dos periodos de tiempo. Da lo siguiente:
Promedio Velocity1 = x cm/(t2-t1) s Velocity2 promedio = x cm/(t3-t2) s
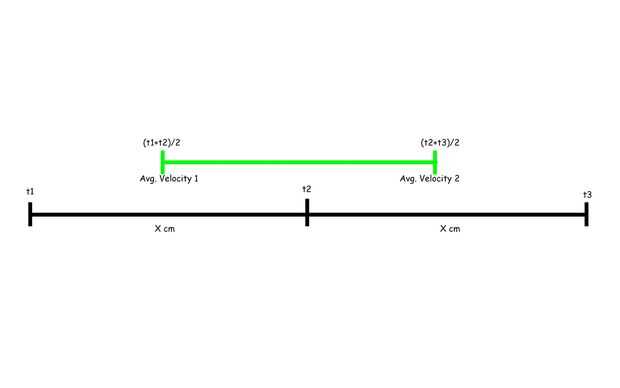
De lo que describí antes, promedio de la velocidad es la velocidad instantánea de un objeto en la media de dos veces. Ya que este es el caso, el arduino conoce entonces:
El objeto viajaba en promedio velocidad 1 en T1 = (t1 + t2) / 2y viajaba en promedio velocidad 2 en T2 =(t2+t3)/2
Este extraño método de promedio de los tiempos para hacer las velocidades instantánea de velocidades promedio es el motor de la Kinemeter.
Y AHORA EL PROCESO PARA DETERMINAR LA ACELERACIÓN ES...:
Aceleración media y constante puede tomarse dividiendo el cambio en velocidad por el cambio en el tiempo. El paso final el arduino realiza para calcular que la aceleración de un objeto es el siguiente:
Acelleration = ((Avg. Velocity2) - (velocidad promedio 1))/(T2-T1)
Los que quieran ver la plena expansión y simplificación acabaría con esto:
Aceleración = ((X/(t3-t2)) - (X/(t2-t1)))/ ((t3-t1)/2)
Y lo que sabes, solucionado para la aceleración. Sólo tiene que enchufar en valores en sus respectivos lugares.
Consulte el diagrama para una representación visual de este experimento.


")









")