Paso 5:
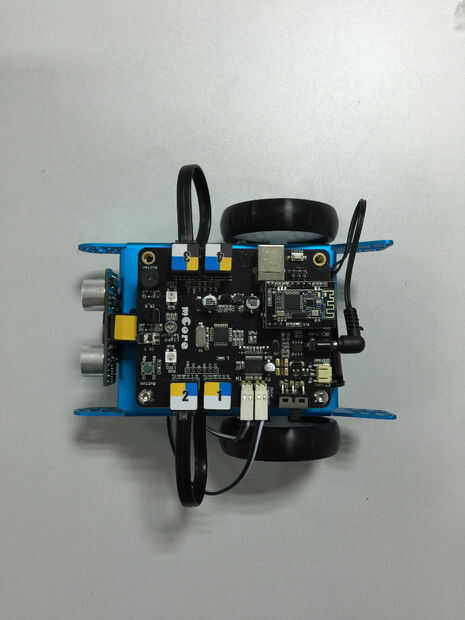
Por último, fije la tarjeta mCore por encima de los espárragos de latón de cuatro y luego usar RJ25 cable para conectar el módulo de sensor de ultrasonidos, RJ25 otro cable se utiliza para conectar el terminal3 y el módulo seguidor de línea y terminal2. (Nota: el módulo Bluetooth y la placa de Control Arduino Base fijados juntos ya en la mCore).
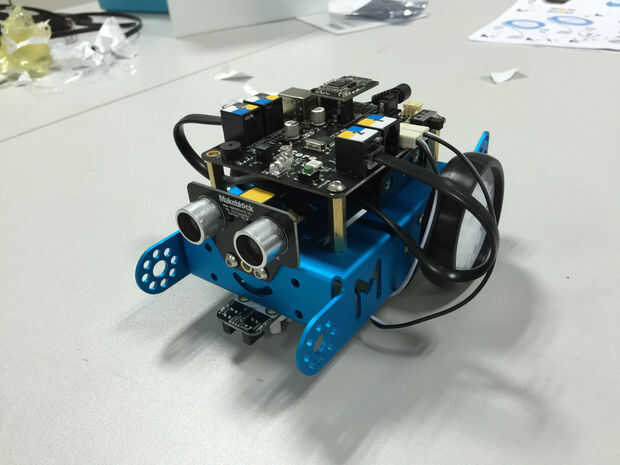
Después de 10 minutos de montaje proceso, se acaba un coche robot completo – mBot.






")






