Paso 13: Configurar los Jumpers de la Board y encendido!

Si no sabes lo que cualquiera de eso significa, no te preocupes acerca de él. Sólo tienes que seguir los siguientes pasos para configurar los puentes para el funcionamiento de su robot.
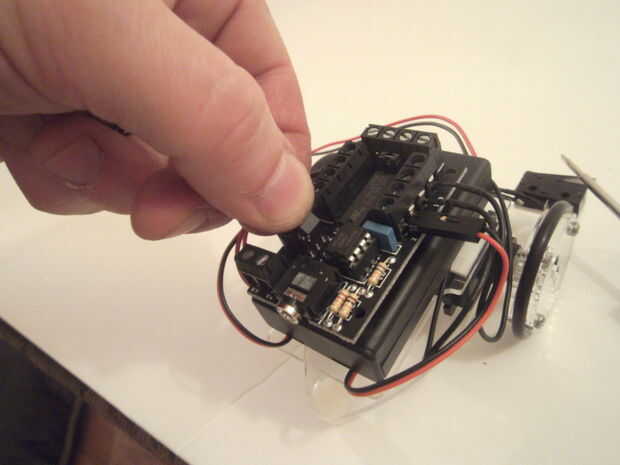
En primer lugar, encontrar el puente RUN/PROG, que se encuentra cerca el enchufe circular en la parte trasera del robot, justo al lado dos el chip de circuito integrado de 8 pines pequeña (que es el cerebro del robot, por cierto). Establece el puente RUN/PROG para que es en el pasador central y la varilla de la ejecución como se muestra en la primera foto.
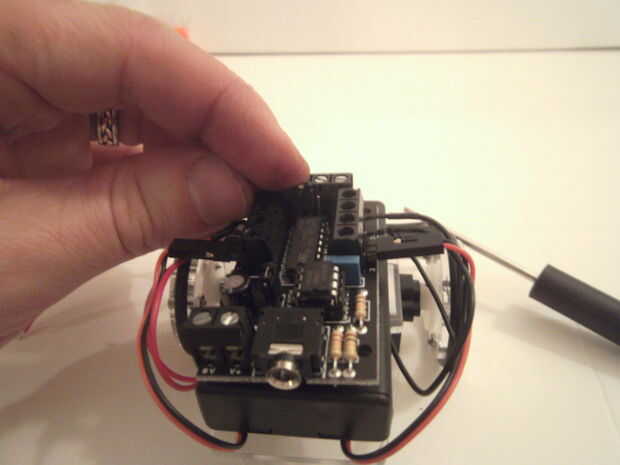
A continuación, encontrar la entrada de 3/5 el puente. Este puente se encuentra justo detrás los conectores terminal sin usar cuatro en el frente del tablero de conductor del motor. Es un poco difícil ver las etiquetas. Establecer el puente de 3/5 por lo que es en el pasador central y 5 pines, como se muestra en la segunda foto. Si usted no puede hacer la imagen, se debe establecer el puente entre las patillas izquierda y el centro.
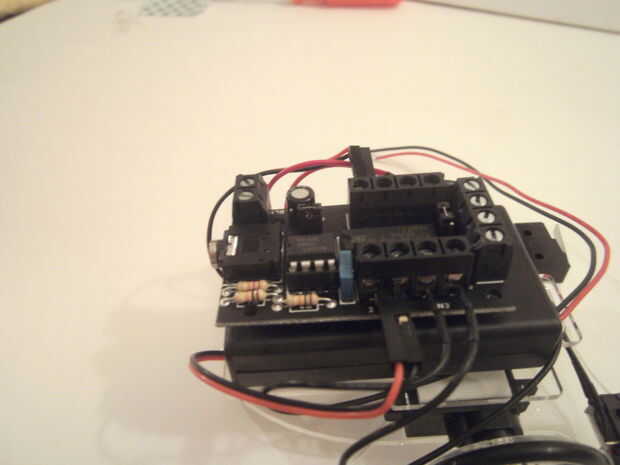
Sus puentes deben estar apoyadas y ven como la tercera imagen.
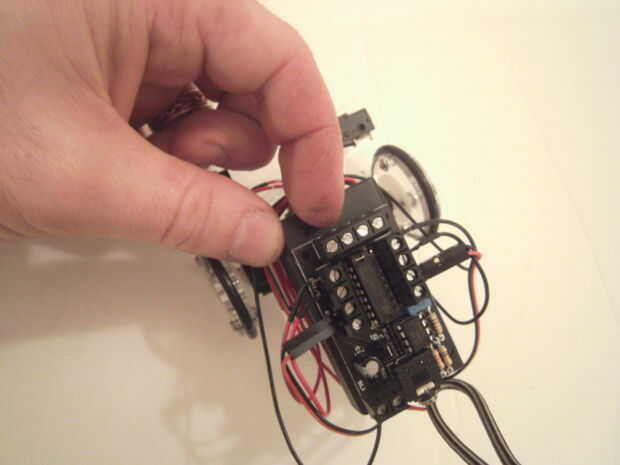
OK, estás listo para probar su robot. La Junta vino preprogramada, tan sólo tiene que cambiar la alimentación. Habrá sobre un retraso de dos segundos, y entonces el robot debe avanzar. Si uno de los interruptores de parachoques es golpeado, el robot parada, de nuevo un poco y girar.




 Kits)")








