Paso 7: Pruebe ahora el brazo robótico
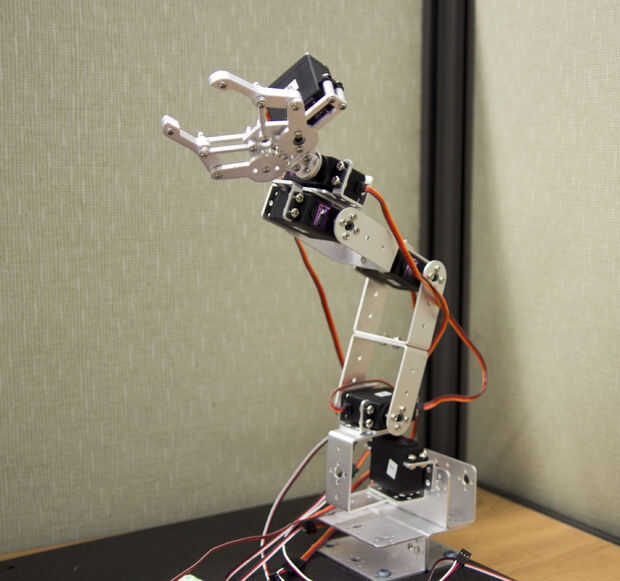

Usando la misma configuración (fuente de alimentación de 5V DC, MICILE tableta, placa Arduino Uno y Arduino Sensor escudo) utilizado para la mano de robot, trate de conectar el brazo robot en lugar de otro. Montar el equipo correctamente según las instrucciones del fabricante. Hay cinco servos incluidos en el kit. Deben etiquetarlos para que coincidan con los números en la placa de Arduino que se conectar a. Etiquetado mina "3" (garra para abrir y cerrar), "5" (garra para girar), "6" (muñeca), "9" (codo), "10" (hombro) y "11" (brazo a girar). Puedes ver qué números utilizamos marcando el código Python que utilizamos. Encontrarás este código en la Página Web MICILE. Pulse el botón que dice "Python Zip archivos - brazo Robot" (se muestra en la imagen de arriba). Esto descargará el código a su archivo de descargas.













