Paso 2: Hacer el motor
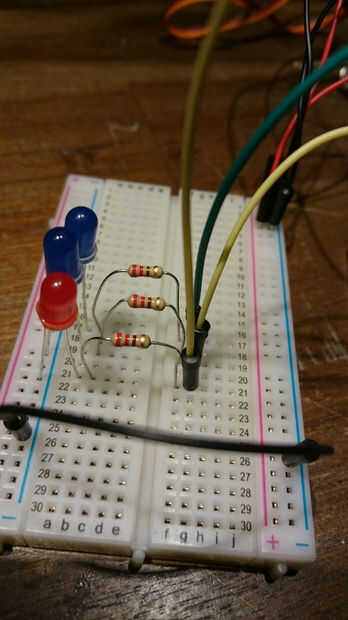
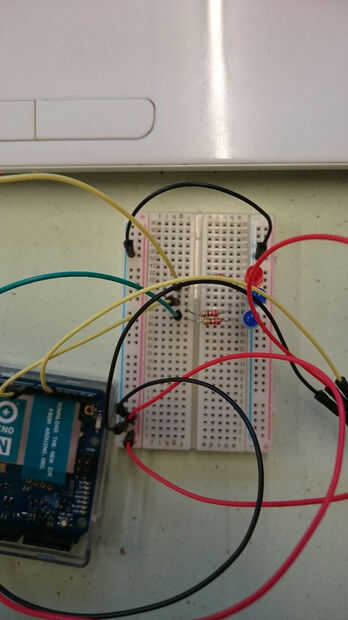
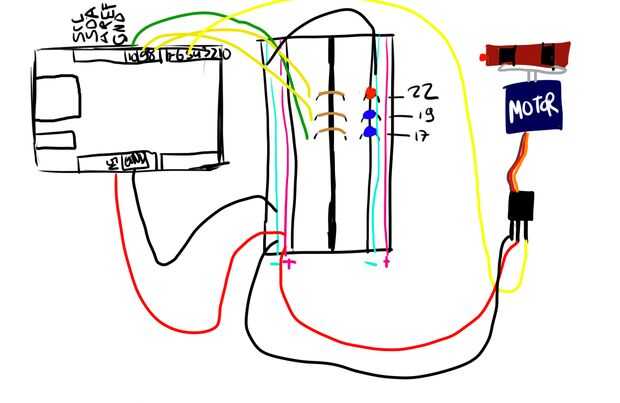
Het eerste wat ik puja Möst hebben fue een motor. En de afbeeldingen zie je azada ik morir heb vastgemaakt. IK heb drie lampjes er mo de toegevoegd aan te kijken de het wel echt werkt.
De código dado hierbij hoort:
#include
Servo myservo; crear objeto servo para controlar un servo / puede crear un máximo de ocho objetos de servo int pos = 0; variable para almacenar la posición servo int letpinA = 10; int letpinB = 9; int letpinC = 8; int DelayA = 5;
void setup() {/ / Pon tu código de instalación, para ejecutar una vez: pinMode (letpinA, salida); pinMode (letpinB, salida); pinMode (letpinC, salida); myservo.attach(5); / / conecta el servo en el pin 5 al objeto servo}
void loop() {/ / Pon tu código principal, para ejecutar varias veces: para (pos = 0; pos < 180; pos += 2) / / va desde 0 grados a 180 grados {/ / en pasos de 1 grado de myservo.write(pos); / / enviar a servo a la posición en la variable 'pos' delay(15); / / espera 15ms para el servo a la posición digitalWrite(letpinA,HIGH); delay(DelayA); digitalWrite(letpinA,LOW); delay(DelayA);
digitalWrite(letpinB,HIGH); Delay(DelayA); digitalWrite(letpinB,LOW); Delay(DelayA); } para (pos = 180; pos > = 1; pos-= 2) / / va de 180 grados a 0 grados {myservo.write(pos); / / enviar a servo a la posición en la variable 'pos' delay(15); / / espera 15ms para el servo a la posición digitalWrite(letpinC,HIGH); delay(DelayA); digitalWrite(letpinC,LOW); delay(DelayA);}
}
")












