Paso 11:
Este es el software de Arduino:
#include < Servo.h >
Servo rotación;
Elevación del servo;
void setup)
{
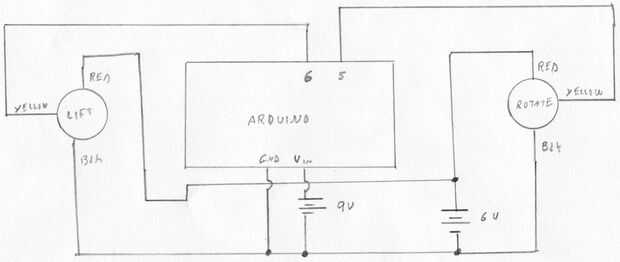
Rotate.Attach(5);
Lift.Attach(6);
Rotate.Write(100);
Lift.Write(90);
Delay(2000);
}
void loop()
{
Rotate.Write(100);
Lift.Write(80);
Delay(1000);
Rotate.Write(130);
Lift.Write(90);
Delay(300);
Lift.Write(110);
Delay(300);
Rotate.Write(130);
Delay(300);
Rotate.Write(130);
Delay(300);
Rotate.Write(120);
Lift.Write(90);
Delay(300);
Rotate.Write(100);
Delay(300);
Rotate.Write(130);
Delay(300);
Rotate.Write(40);
Lift.Write(90);
Delay(300);
Rotate.Write(90);
Lift.Write(90);
Delay(300);
Rotate.Write(40);
Lift.Write(110);
Delay(300);
Rotate.Write(100);
Lift.Write(90);
Delay(300);
Rotate.Write(40);
Delay(300);
Lift.Write(90);
Delay(300);
Lift.Write(110);
Delay(200);
Lift.Write(90);
Delay(300);
Lift.Write(110);
Delay(300);
Lift.Write(90);
Delay(200);
Rotate.Write(130);
Lift.Write(90);
Delay(300);
Lift.Write(110);
Delay(300);
Rotate.Write(130);
Delay(300);
Rotate.Write(130);
Delay(300);
Rotate.Write(120);
Lift.Write(90);
Delay(300);
Rotate.Write(100);
Delay(300);
Rotate.Write(130);
Delay(300);
Rotate.Write(40);
Lift.Write(90);
Delay(300);
Rotate.Write(80);
Lift.Write(90);
Delay(300);
Rotate.Write(40);
Lift.Write(110);
Delay(300);
Rotate.Write(100);
Lift.Write(90);
Delay(300);
Rotate.Write(40);
Delay(300);
Lift.Write(90);
Delay(300);
Lift.Write(110);
Delay(200);
Lift.Write(90);
Delay(300);
Lift.Write(110);
Delay(300);
Lift.Write(90);
Delay(200);
Lift.Write(90);
Delay(300);
Rotate.Write(100);
Lift.Write(90);
Rotate.Write(130);
Delay(300);
Rotate.Write(30);
Delay(300);
Rotate.Write(135);
Delay(300);
Rotate.Write(40);
Delay(300);
Rotate.Write(100);
Delay(300);
Lift.Write(90);
Delay(200);
Lift.Write(100);
Delay(1000);
Lift.Write(80);
Delay(10000);
}




")








