Paso 10: Cómo hacer el eje cardán sin escobillas con Arduino
Antes de pasar a la siguiente etapa donde se realiza el cardán de 2 ejes, aquí muestro Cómo hacer el DIY eje cardán sin escobillas con Arduino que trabaja en el DCUMENTARY (12) en el paso anterior. Para evitar la larga receta supongo que los lectores aquí tienen bastante experiencia con Arduino y el girocompás como mi proyecto anterior.
:
[Materiales]
- Motor sin cepillo de 3 fases para cardán (x1): limitado a 14 polos, 12 ranuras (aunque conexión Y y Delta son aceptables, asignación de ranuras tiene que ser igual que la figura se muestra en este manual.)
- Arduino UNO (x1)
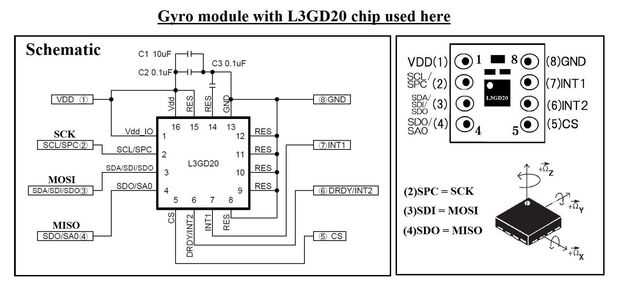
- Portadores de viruta del girocompás de L3GD20 (x2): interfaz SPI con 4 líneas (* 1)
- Baterías AA (x4-8)
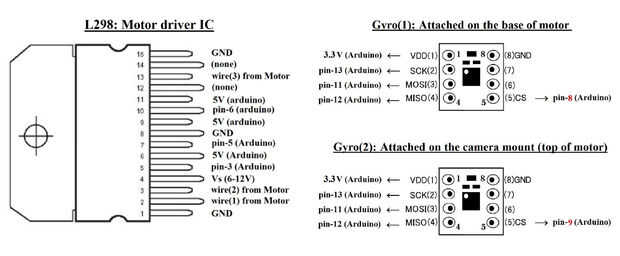
- Driver motor L298 (x1)
- Placas (x2): para el soporte de Cardan y el soporte de cámara
- Otros: Cosas populares para trabajar con Arduino
(* 1) Aquí usé portador de Akizuki. Sé que otra compañía de L3GD20 producido por chip. Este último está disponible también fuera de Japón. Si se utiliza en lugar de la anterior, debe considerarse el cuadro con el esquema anterior.
:
[Programa (o esbozo)]
- Descargar el archivo pdf adjunto al final de este paso
- Abrir en una aplicación de lector adecuado
- Copia todo el texto en ella
- Pegar la copia al IDE de Arduino y corregir erratas
- Subir programa corregido al usar el IDE de Arduino
- Aunque este bosquejo está optimizado para la conexión de Delta, es aplicable para la conexión Y
- La señal de salida del secundario giroscopio en el parte de cámara (1) depende de la forma de fijarlo
- Si el cardán no detener ni compensar pero gira la dirección equivocada (* 1), tratar el último punto de "cableado" por debajo de la primera
- Si el cardán todavía no funciona bien, las dos líneas comentada en este programa debe hacerse efectiva en lugar de comentar las alternativas de dos líneas, A y B
- Si todavía el cardán no funciona bien, vuelva a intentarlo el último punto de "cableado" más abajo
:
[Cables]
- Ver la figura en la parte superior de este paso y seguir
- Tres cables con Motor sin escobillas están conectados al pin 3, 5 y 6 en el Arduino UNO en orden arbitraria
- Si el cardán no detener ni compensar pero gira la dirección equivocada (* 2), cambiar esta conexión apropiadamente
(* 1, * 2). Para que el cardán funcione bien, ambas salidas de gyros y cableado es necesario corregir. A veces la salida del giro podría ser anormal a pesar de la posición correcta. Luego cortar la energía a Arduino y gyros una vez.
:
[Calibración]
- RESET Arduino
- No toques el stick de 6 a 10 segundos: mantener ambos giros todavía
:
El flujo bruto del programa en el archivo pdf adjunto siguiente podría entenderse por verlo en forma de bloque por bloque. Por otra parte los detalles de algunos bloques de podrían no ser tan claros. Necesita más pasos para explicarlos. Si muchas solicitudes fueron conseguidas en el futuro podría decirse en otra historia.



 con Arduino")








