¿Paso 1: Una cuestión importante, que es al giro?
Movimiento de un cuerpo rígido en el espacio puede describirse con dos elementos independientes; rotación y traslación paralela. El primero puede ser anulado o compensado por un instrumento llamado cardan. Una cámara montada en el cardán más profundo podría ser libre de movimiento de rotación cuando el apoyo del cardán, aunque no sea libre de cambio paralelo. Por lo tanto, para el cardán impulsado por motor, postura(o ángulo ) de la cámara se convierte en la información importante que le sigue.
Tenemos varias alternativas para calcular el ángulo del objeto en movimiento. Aquí es barato giro módulos son usados. La velocidad angular del objeto se puede medir por giro. Y Arduino traduce en un estimado grado de cambio de ángulo del objeto. Ahora tenemos las siguiente alternativas para la nueva materia que el lado del cardán, el girocompás está conectado a.
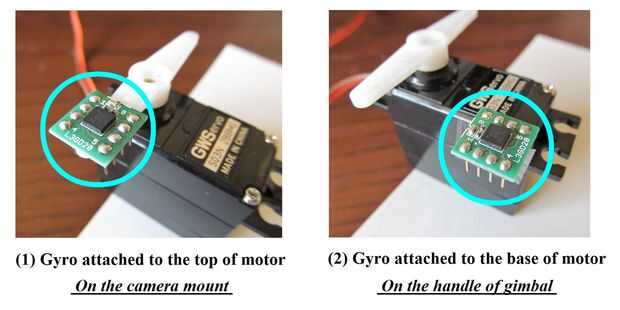
(1) adjuntar giro a "la cámara" (fijación a la montura de la cámara)
(2) adjuntar giro al "soporte lateral" (fijación a la base de la manija)
:
Lo más diferente entre ellos es si se consigue la regeneración de la rotación intencional del motor controlando el cardán o no. Cuando adjuntar giro a (1) parte de la cámara, movimiento intencional no se distingue del no-intencional y se mide sólo la suma de ellos. Por otro lado cuando giro para el lado de apoyo (2), se mide sólo la rotación no intencional pero intencional no es. Por lo tanto, tienen puntos buenos y malos respectivamente como abajo.
(1) fijar el giro al lado de la cámara (fijación a laparte superior (o rotor) del motor)
- Estrategia: Cuando la cámara gira un poco, el motor se anulan inmediatamente en coche.
- Ventajas: No es necesario estimar el ángulo correctamente. (Así que no es necesario saber cuánto el motor gira su eje.)
- Desventajas: La cámara vibra fácilmente a menos que el motor se controla adecuadamente.
(2) adjuntar giro para el lado de apoyo (fijación a labase (o estator) del motor)
- Estrategia: Cuando el apoyo gira, estimar el grado y rotar motor tanto como a la dirección contraria correctamente.
- Ventajas: Vibración causada por la regeneración de rotación del motor no se produce.
- Desventajas: La estimaciones correctas son necesarias para la rotación de ambos apoyo y de la cámara.
:
Estas diferencias son importantes para la opción del motor. Cuando el giro es hacia el lado de apoyo (2), ambos grados de los ángulos de la parte superior y la base del motor deben estimarse correctamente. Por lo tanto Servo o Motor paso a paso es probable ser utilizado, que podría controlar el ángulo directamente.
Por otra parte, cuando el giro se une a la parte de la cámara (1), sólo la rotación de la parte superior del motor debe ser restringida desde el punto de vista fijo en un lugar fuera. Entonces el grado de esta rotación no debe necesariamente estimarse. Por lo que el Barato cepillo Motor de la C.C. puede funcionar.
Ahora parece que el parte de cámara (1) es mejor adjuntar giro, desde el punto de vista de cualquier libertad de opción motor o menos esfuerzos necesarios para estimar los grados correctos de ángulos.



 con Arduino")








