Paso 3: Hacer el eje cardán de Servo (parte 1)
En este paso y el siguiente, el Motor Servo es probado por un cardán de cámara de eje.
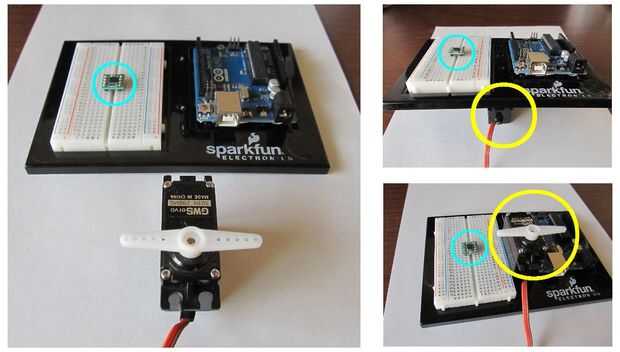
En el paso 1 que se describe ese Servo Motor podría trabajar en cualquiera de los casos donde girocompás está conectado a la parte de la cámara (1) o (2) apoyo lateral del cardán. En este paso girocompás está conectado a la parte de la cámara (1). Aunque no es necesario saber los grados correctos de ángulos en este caso necesariamente, respectivamente adoptaron dos estrategias alternativas. Los resultados observados son los siguientes.
- La estrategia, el "giro motor tanto como calcula el grado de rotación del soporte del cardán a la dirección contraria," no se puede cancelar la rotación suficiente.
- Resultados de la estrategia, "girando el motor hasta cancelación de rotación de la cámara", en demora indemnización o vibraciones del montaje de cámara.
- Por lo tanto no es fácil decidir cuánto Servo gira.
:
La estrategia anterior de arriba está preparada para el giro atado lado de apoyo (2). Aunque se cree que funciona tan bien para el giro unido a la parte de la cámara (1) intuitivamente, compensa sólo la mitad de la rotación en la reflexión.
Por otro lado la estrategia de este último está preparada para el caso donde girocompás está conectado a la parte de la cámara (1). Aquí el Motor Servo recibe directamente el grado de ángulo a. Así que es no es fácil para controlar la velocidad angular o aceleración.
Cambiando el grado a girar poco a poco, podemos controlar la velocidad angular en cierta medida. Pero se reunirían con la vibración en velocidad o diferido de compensación en una velocidad más baja fácilmente.
La ventaja del Motor Servo es correcta con el grado recibido. Por lo tanto cuando se utiliza un Servo Motor debe ser mejor que el giro está colocado en el lado de apoyo (2) desde el punto de vista de la eficiencia de control, donde la vibración causada por retroalimentación no podría observarse.



 con Arduino")








