Paso 1: Crear una estable base



Para la base del robot, usé un seis piernas caminar caja Kit # 21-135, que está disponible de varias fuentes diferentes. Aquí está una fuente: http://www.jpmsupply.com/servlet/the-658/Gearbox,-caminando, - Elenco, - Kit / detalle.
Que previamente había creado un robot basado en Arduino que usa un chip de puente h de control de motor para funcionar los motores. También tiene una 6 voltios 1000mAH recargables NiCad batería que era rectangular y plana para poder. Pero eso es todo lo que tenía.
Me encanta las esferas, así que tomó un árbol de navidad ornamento de acrílico de Hobby Lobby y haga un agujero en la parte inferior para pasar los alambres a través. Usé 1 1/2 pulgadas #6 tornillos y tuercas como separadores para sostener la esfera sobre la base de seis patas.
Pero una vez que he creado el primer palillo de hi-hat, me di cuenta que yo no tenía ningún lugar estable para unirla a.
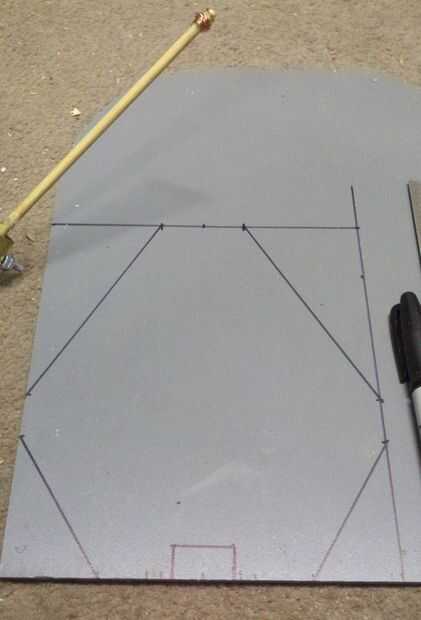
Tuve algunos hoja de plástico gruesa de 1/8 de pulgada colocación redonda, así que marqué a un hexágono estirado para usar como base. Recorte con una dremel y un disco de corte de plástico. Os adjunto a la base con tornillos #6. La base tiene algunos lugares que tendrá un tornillo de máquina.


")










