Paso 3: finalizar y probar el stick de hi-hat

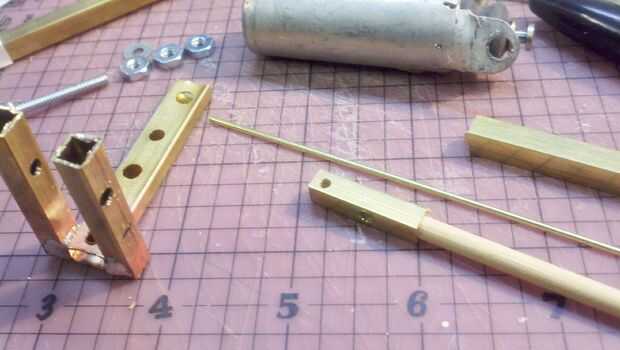


La segunda foto muestra todas las piezas listas para montar en el actuador de palo de hi-hat. Las ultimas fotos muestran claramente cómo se ve el extremo del solenoide. La tercera foto muestra cómo utilicé alambre de latón para envolver alrededor del solenoide. El cable fue entonces doblado para colocar en el orificio inferior de la palanca de hi-hat. Un poco de ajuste hecho para una acción suave y rápida.
En este momento tengo el funcionamiento de solenoide de palo de hi-hat. Se desencadena por el PING (((sensor como una prueba. Sobresale la plataforma trasera para dejar espacio para el palo bajo y solenoide. El PING (((sensor está conectado a un servo pequeño gramo 9 montado en la parte delantera del robot. Explora el PING (((sensor de ida y vuelta. Código más adelante compara lecturas cuando esté buscando un obstáculo o buscando algo para jugar. Evitación del obstáculo busca la zona más abierta, luego da vuelta el robot para hacer frente a esa dirección. Buscando una superficie de tambor en hace lo contrario, tratando de encontrar el objeto más cercano.


")










