Paso 5: Último módulo--ajustar posición de lechón y conseguir justo el objetivo!
¿Cómo tratamos con el problema de la precisión para agarrar la moneda de destino? ¡ A ver!
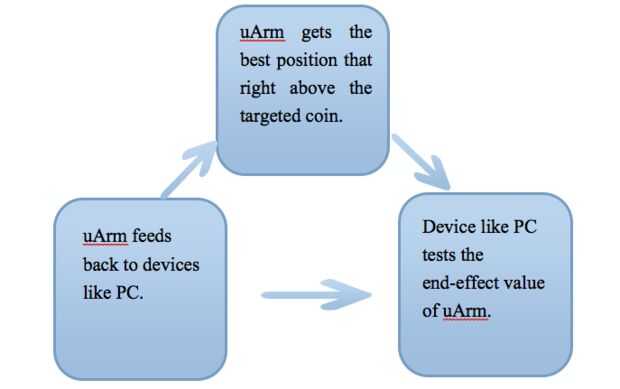
Al finalizar las conversiones de coordenadas por primera vez, uArm comenzará a ejecutar los comandos. Después de este movimiento, uArm a transferir su información de posición actual hacia atrás y comparar esta posición real con la moneda, así podemos conseguir un error en realidad. Por último, añadiendo este error con la misma coordenada, uArm recibirá un nuevo comando y comienzan a moverse otra vez. Como resultado, uArm a seguir corriendo esta circulación hasta que el lechón se mueva a la posición superior derecha de la moneda!
 con mensaje oculto!")










