Paso 4: Configuración de la Junta de ADK y pruebas con DemoKit

Sin la placa ADK el DemoKit aplicación que sólo has compilado es un poco inútil, así una vez que se ejecuta en el teléfono (verás un robot Android con un panel frontal abierto), desconecte el cable USB de la computadora (con el otro extremo todavía conectado al teléfono) Conéctelo a USB host puerto la ADK board.
La energía del enchufe en la placa ADK y usted debe ver un indicador de luz en el tablero principal de Arduino (debajo de la versión parcial de programa "escudo" tabla que está en la parte superior).
Ahora que DemoKit está instalado en su teléfono se puede ejecutar tantas veces como te gusta - ya no es necesario recompilar a menos que usted desea hacer cambios. Al conectar el teléfono a la Junta ADK, obtendrá un mensaje como se muestra en la segunda imagen - no olvide comprobar el "uso por defecto para este accesorio USB", porque también queremos que utilice el programa RealMaze con la placa ADK. Simplemente haga clic en Aceptar para comenzar a utilizarlo.
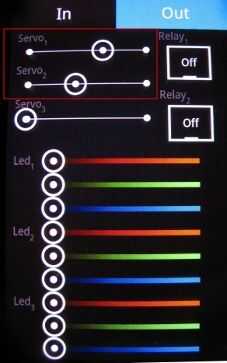
La pantalla tiene una serie de indicadores de entrada de hardware - que muestra el estado de los botones, temperatura, sensores de luz y mucho más. Puntee en la ficha "Out" en la parte superior para mostrar los controles para las salidas ADK - relé de conmutación, servo controles y controles de brillo del LED.
Conectar los servos a la Junta ADK, teniendo cuidado con la polaridad - negro = tierra o-, rojo = +, gris = señal.
Ahora usted puede controlar los servos usando los cursores (segunda imagen). Si no es trabajo Compruebe el poder de luz en el tablero, conexión USB y vuelva a verificar la polaridad de servo. Prueba las otras salidas en el escudo de la versión parcial de programa: luces y relés.

")




")






