Paso 1: La teoría de la parte 1
Básicamente hay 2 pasos. La primera es a través del laberinto y encontrar el final de la misma. El segundo es optimizar ese camino para que tu robot puede viajar a través del laberinto, pero hacerlo perfectamente con hacia abajo cualquier callejones sin salida.
¿Cómo el robot encuentra al final del laberinto?
Usar una técnica llamada la mano izquierda en la pared. Imagino estás en un laberinto y mantenga su mano izquierda en un el borde de la pared en todo momento. Hacer esto sería eventualmente sacarte de un laberinto no bucle. Este instructable voluntad sólo acuerdo con laberintos que lazo no en ellos mismos.
Esta izquierda en algoritmo de pared se puede simplificar en estas simples condiciones:
-Si puede girar a la izquierda entonces seguir adelante y girar a la izquierda,
-otra cosa si puede continuar recto y luego recto,
-otro si puede girar a la derecha y gire a la derecha.
-Si estás en un callejón sin salida entonces dar vuelta alrededor.
El robot tiene que tomar estas decisiones cuando en una intersección. Una intersección es cualquier punto en el laberinto donde tienes la oportunidad de convertir. Si el robot es una oportunidad para activar y no se vuelve esto es considerar derecho. Cada paso tomado en una intersección o cuando de vuelta tiene que ser almacenado.
L = giro a la izquierda
R = derecha
S = pasando directamente por un giro
B = vuelta
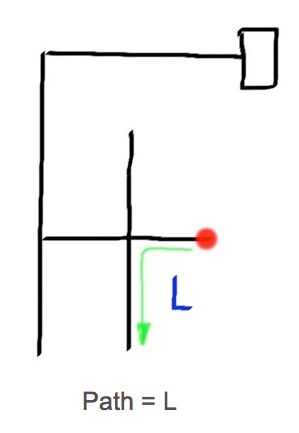
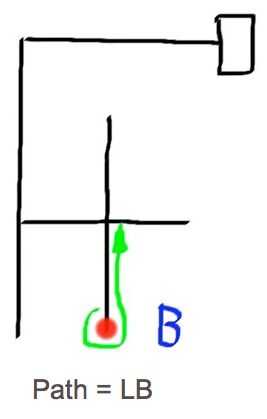
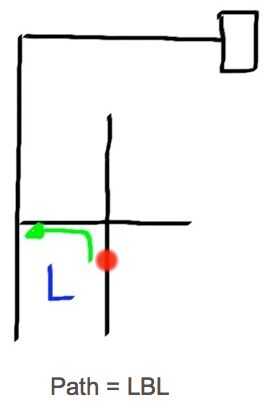
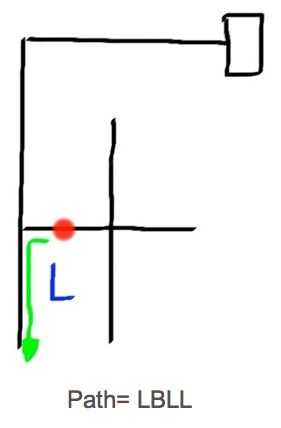
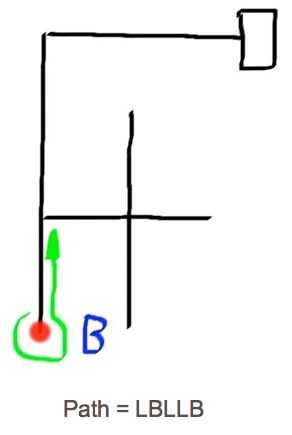
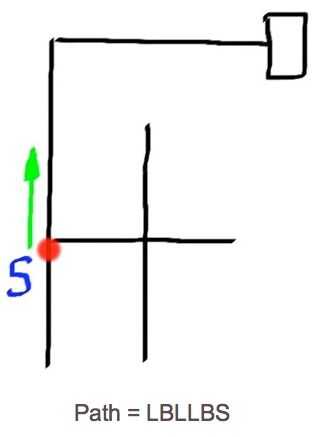
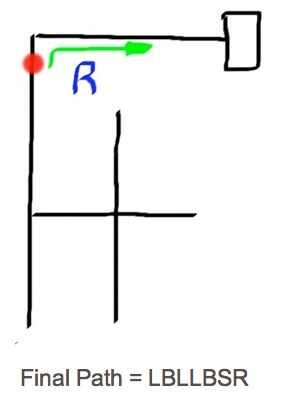
Solo tenemos que aplicar este método a un laberinto simple y ver si puede seguir. Ver las fotos para ver este método en acción.
El círculo rojo será el robot.
Como se puede ver en las fotos para este ejemplo, la ruta final es LBLLBSR.













