Paso 3: La teoría de la parte 3
Que mueven parece en la foto.
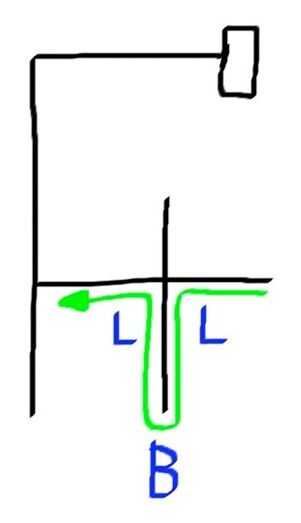
En lugar de girar entonces vuelta izquierda y girar a la izquierda otra vez, el robot debería haber ido directamente. Así que podemos decir que LBL = S.
Esta sustitución es lo que el robot utiliza para optimizar la ruta. Es un ejemplo pero aquí está la lista completa:
LBR = B
LIBRAS = R
RBL = B
SBL = R
SBS = B
LBL = S
Usted no puede venir a través de todos estos cuando laberinto de problemas, pero se necesitan optimizar la ruta. Algunos incluso Coloque "B" en el camino. Esto es necesario para optimizar aún más el camino correctamente. Usted puede averiguar por qué para usted o simplemente confianza me.
Permite optimizar nuestro camino ahora que sabemos cómo:
Ruta = LBLLBSR
LBL = S por lo que sería nuestra nueva ruta: SLBSR
También sabemos libras = por lo que sería nuestro nuevo camino: SRR
Como se puede ver que tenemos la ruta estábamos buscando.
Mi robot optimiza la ruta mientras que viaja. La ruta de acceso se almacena en una matriz y cada vez va a almacenar un nuevo movimiento, comprueba ver si el anterior era una "B", si lo fue luego optimiza el camino. Necesitas saber por lo menos 3 movimientos optimizar la ruta de acceso: el movimiento antes y después de la vuelta alrededor (y la vuelta alrededor de sí mismo).













