Paso 8: El regulador del Motor
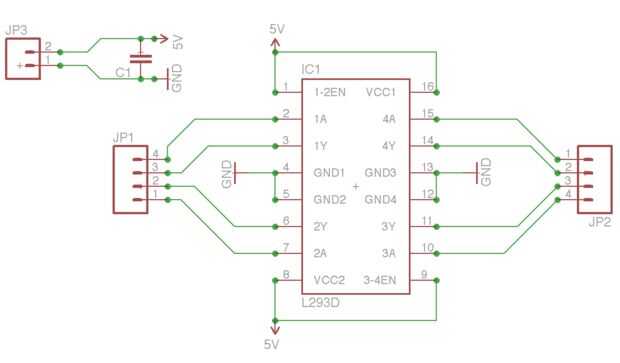
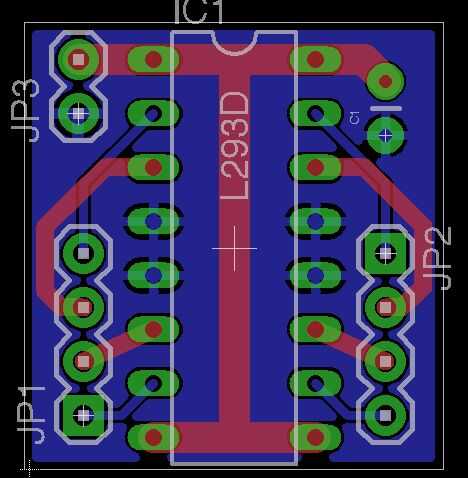

Si no utiliza un PCB, siempre puede hacer este simple circuito en algún tablero de prototipo.
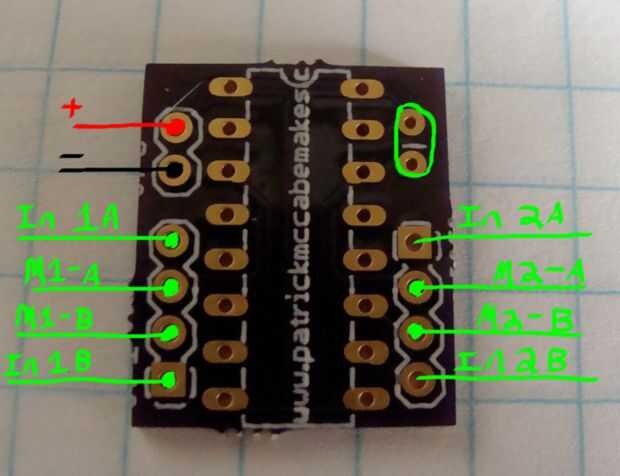
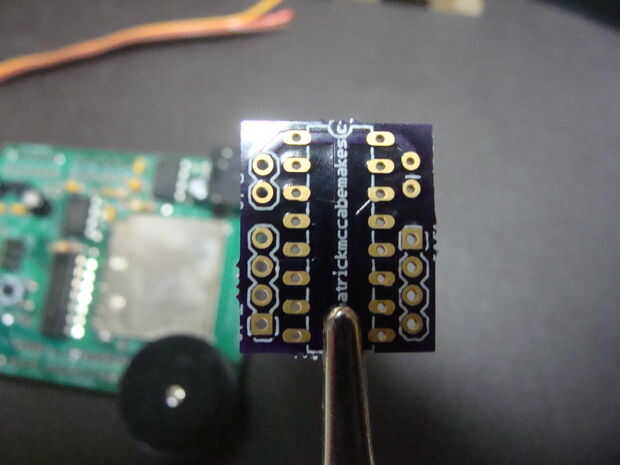
Ahora para conectar el controlador del motor. Tengo un diagrama de etiquetado en las fotos. Mirando la última foto, tengo el motor en la parte inferior de la imagen conectada a lo que he etiquetado como "M1-A" y "H1-B". Estas son las salidas del controlador de motor para el primer motor. Tengo el motor en la parte superior de la última foto conectada a lo que he etiquetado como "M2-A" y "M2-B". Estas son las salidas del controlador de motor para el motor del segundo.
Ahora tiempo para las entradas de controlador de motor. La salida digital del Arduino 7 obtiene conectada a lo que he etiquetado como "En 1A". Esta es la primera entrada del primer motor. La salida digital del Arduino 6 obtiene conectada a lo que he etiquetado como "En 1B". Esta es la segunda entrada del primer motor. La salida digital del Arduino 5 obtiene conectada a lo que he etiquetado como "En la 2A". Esta es la primera entrada del segundo motor. La salida digital del Arduino 8 llega por cable a lo que he etiquetado como "En 2B". Esta es la segunda entrada del segundo motor.
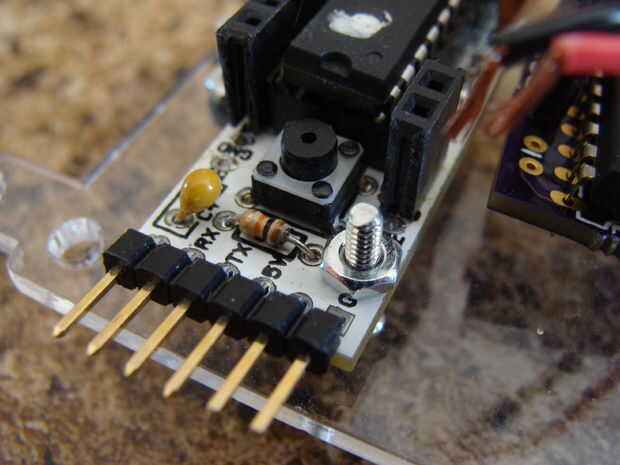
Finalmente alimentación y tierra conseguirán conectados el Arduino 5v y Gnd pernos en el frente de la Junta. En la foto tengo los cables conectados pero no está conectado todavía.
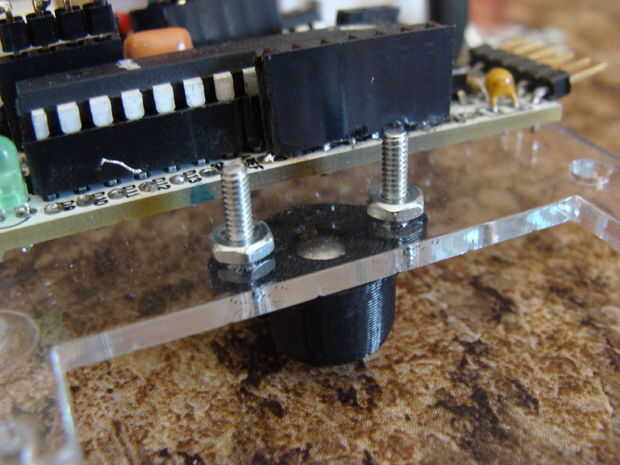
Como se puede ver también siguió adelante y utiliza algunas de las #2 tuercas y los pernos a perno de la rueda de la bola y Arduino.













