(Si te gusta este Instructable, no olvide votar en ella (por encima de: bandera de la esquina a la derecha). Rex, el Robot está compitiendo en robótica y sensores concursos. ¡Muchas gracias! ;-)
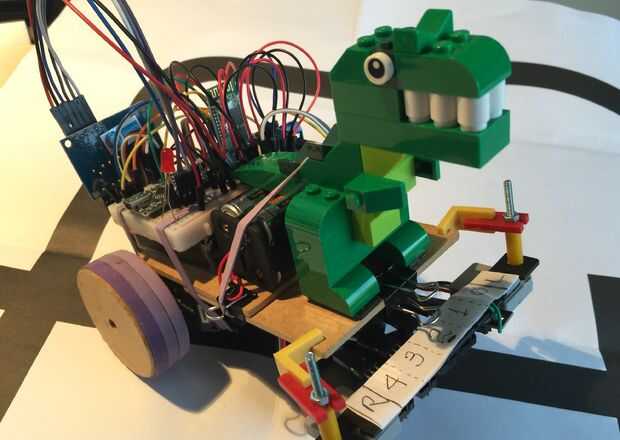
Este Instructable fue desarrollado en mi último proyecto: Robot seguidor de línea - Control PID - Setup Android. Una vez que un robot con la línea siguiendo las capacidades, el siguiente paso natural es darle cierto grado de inteligencia. Por lo tanto, nuestro querido "Rex, el Robot" tratará de encontrar cómo escapar de un "laberinto" en un camino más corto y más rápido (por cierto, odia el Minotaurus;-).
Para empezar, ¿cuál es la diferencia entre el laberinto y el laberinto? Según http://www.labyrinthos.net, en el mundo de habla inglesa a menudo se considera que para calificar como un laberinto, un diseño debe tener opciones en el camino. Claramente, esto incluye muchas de las modernas instalaciones en parques de entretenimiento y atracciones turísticas, incluyendo nuestro 2D laberinto aquí. Consenso popular también indica que los laberintos tienen una vía que conduce inexorablemente de la entrada a la meta, aunque a menudo por los más complejos y liquidación de rutas.
La mayoría de los laberintos, sin embargo complejos su diseño puede aparecer, se formaron esencialmente de una pared continua con muchos nudos y ramas. Si la pared que rodea el objetivo de un laberinto está conectada con el perímetro del laberinto en la entrada, el laberinto puede resolverse siempre por mantener una mano en contacto con la pared, sin embargo muchos desvíos que pueden implicar. Estos laberintos 'simples' se conocen correctamente como "Simplemente conectados" o laberintos "perfecto", o en otras palabras, que no contienen bucles.
Volviendo a nuestro proyecto, se dividirá en dos partes (o "pases"):
1. (primer pase): el robot encuentra su camino hacia fuera de un laberinto perfecto no conocido. No importa donde usted lo puso dentro del laberinto, encuentra una "solución".
2. (segundo paso): una vez que el robot encuentra una solución posible laberinto, debe optimizar su solución de encontrar el camino más corto de principio a fin.
El siguiente video, se mostrará un ejemplo del robot, encontrar su camino. En la primera vez que el robot explora el laberinto, por supuesto perderá mucho tiempo "pensando" Qué hacer en cualquier intersección. Para probar las posibilidades, tendrá varios caminos equivocados y callejones sin salida, lo que la hace correr caminos más largos y realizar innecesarias vueltas en "u". Durante este primer camino ("paso 1"), el robot va acumulando experiencias, "tomar notas" acerca de las diferentes intersecciones y eliminar las ramas mal. En su segundo paso ("paso 2"), el robot va recto y rápidamente hasta el final sin duda ni error. A lo largo de este Instructable, exploraremos en detalle cómo hacerlo:




 con Arduino y Android(bluetooth)")








 a través de Bloc de notas")