Paso 6: Guardar la ruta de acceso
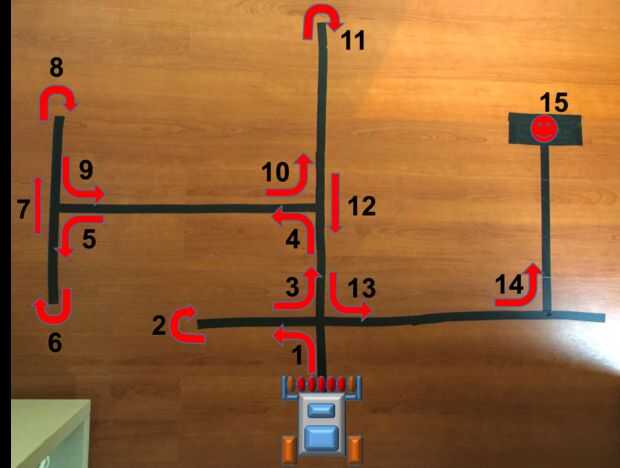
Consideremos el ejemplo como se muestra en la foto. En el elegido el punto de partida, el Robot encuentra 15 intersecciones antes de alcanzar el final del laberinto:
- Izquierda (L)
- Parte posterior (B)
- Izquierda (L)
- Izquierda (L)
- Izquierda (L)
- Parte posterior (B)
- Derecho (S)
- Parte posterior (B)
- Izquierda (L)
- Izquierda (L)
- Parte posterior (B)
- Derecho (S)
- Izquierda (L)
- Izquierda (L)
- Final
Lo que debe hacerse en cualquiera de las intersecciones es salvar la acción realizada en la misma secuencia que suceden. Para ello, vamos a crear una nueva variable (matriz) que almacenará el camino que ha tomado el robot:
camino de Char [100] = "";
También debemos crear 2 variables de índices para ser utilizado junto con la matriz:
unsigned char longitud = 0; la longitud de la trayectoria
int pathIndex = 0; utilizada para llegar a un elemento de matriz específica.
Por lo tanto, Si ejecutamos el ejemplo mostrado en la imagen, nos terminará con:
path = [LBLLLBSBLLBSLL]
y pathLengh = 14




 con Arduino y Android(bluetooth)")








 a través de Bloc de notas")