Paso 1: Diseño de geometría
GeoGebra puede ayudarle a diseñar la mecánica de las patas del robot:
http://www.geogebra.org/download
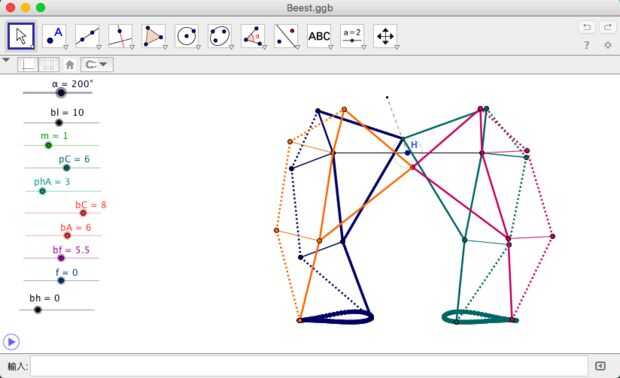
Trate de descargar e instalar GeoGebra y abra el archivo adjunto Beest.ggb, pulse el botón play en la esquina inferior izquierda. Usted puede ver cómo funciona!
Cada valor en el cursor de lado de mano izquierda se puede ajustar y puede ver en tiempo real el efecto en el diagrama.
Una vez que el movimiento de las piernas parece muy bien para usted, recuerde su valor ajustado, usará en próximas etapas.



, con piezas hechas en casa (Guía del reciclaje) primera parte")
.")








