Paso 2: Configuración del circuito
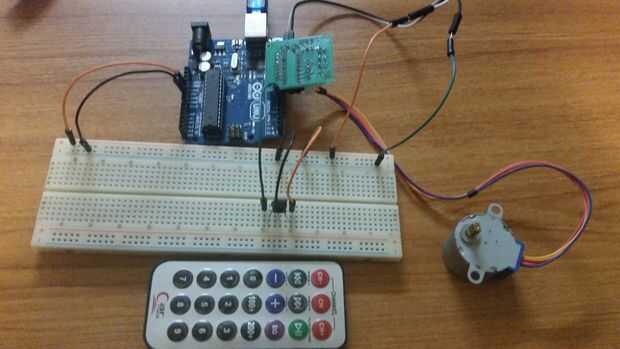
En la foto anterior es mi circuito breadboarded y cuenta con todos los componentes claves para completar el movimiento que rota de la parte superior. La primera cosa que usted notará es el control remoto que utiliza para actuar como mi entrada (botones 1-6). En el protoboard es un componente negro, que es mi sensor de infrarrojos que detecta las entradas del control remoto. El cable de la derecha (naranja) se une a la fuente de tensión, el alambre central (negro) está conectado a tierra y el cable izquierdo (verde) se coloca en un pin en la placa de Arduino para transmitir la información de entrada para el Arduino que luego ejecutará un comando. La placa Arduino también está suministrando el voltaje (cable de 5 voltios, anaranjado) y terminales de tierra (cable negro) a los carriles de alimentación respectivas en el protoboard. Por último, usé un motor de pasos (visto a la derecha) para llevar a cabo el movimiento. El escudo verde conectado a la placa Arduino actúa como los pines de salida para el Arduino causar que el motor paso a paso mover. Y por último el motor paso a paso está conectado a los terminales de tierra (cable verde) y voltaje (cable naranja).







")





