Paso 3: electrónica
Construir el circuito, tienes:
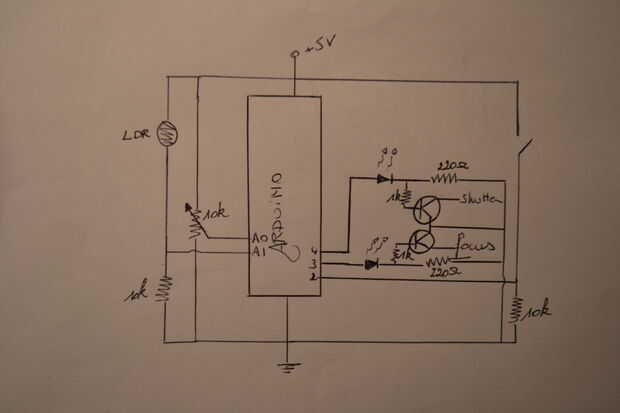
• LDR: necesario para detectar el rayo láser, y cuando se ha ido.
• 10k potenciómetro: solía elegir el retardo
• LED: utilizado en el modo de inicialización (ver explicación anterior) y a ver si la cámara debe hacer algo (pero tal vez no)
• Interruptor/pulsador: para enfocar la cámara.
• 2 transistores BC547, utilizado para conectar los 3 cables de la cámara remota.
• 2 x 10 k resistencia como Levante resisitor
•2x resistencia de 1 k: como limitador de corriente
•2x 220 ohm resisitor como Levante resistencia
• 1 x azul azúcar 2:2 ser capaz de cambiar la longitud del cable del sensor
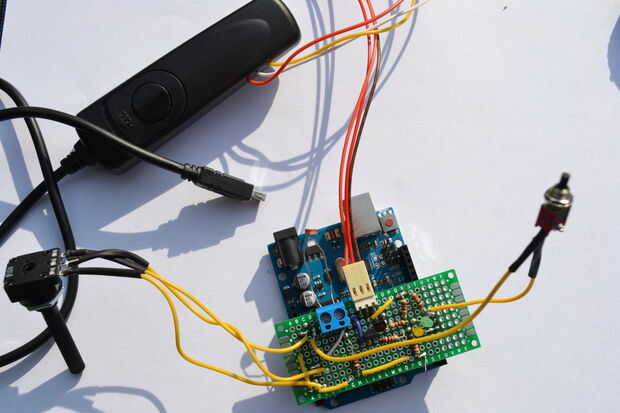
• 1 x conector de la PCB: conectarse con el mando a distancia para que sea fácil de conectar.
•7x pin para arduino: Asegúrese de que estén suficientemente largo cuando ou comprar (yo usé los del paquete de arranque de arduino)
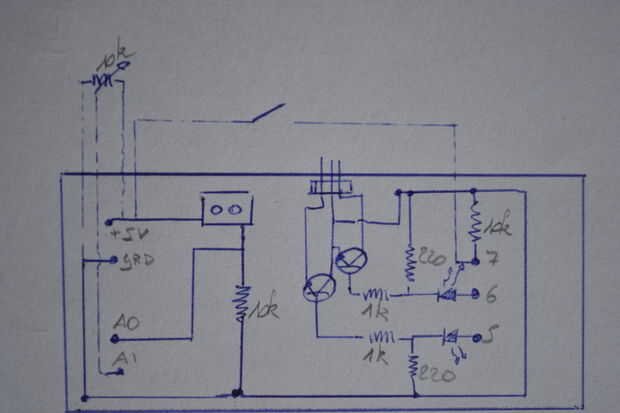
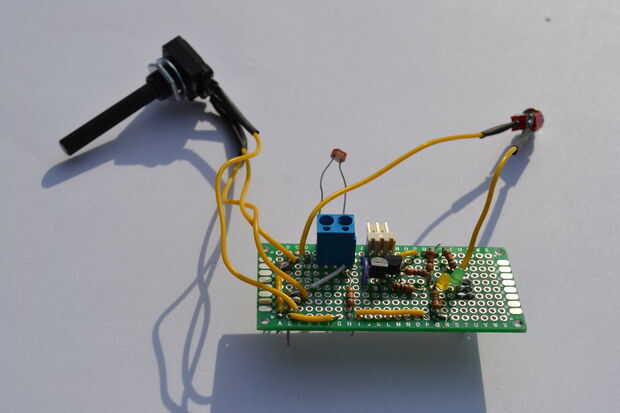
He utilizado el diagrama que encuentras por las fotos para conseguirlo todo en un tablero. El goundwire en el scematic parece desaparecer en la parte derecha del tablero. Lo pongo debajo de la tabla por lo que podrías dejar algún lugar abierto para colocar ahí un conector para una LCD (en el futuro)
Problema con las clavijas es que la soldadura de los pernos será en la parte superior del tablero y las terminaciones de cable del resto de los componentes será en el PCB. El truco es darle una el alambre de resistencia /... desea conectar al pin de algo más de espacio. Una parte del cable unstriped será en la parte superior y luego suelde el cable en la parte superior con el conector y el resto se puede hacer en el PCB. (ver última foto)
Pernos:
Los pernos que se usa para obtener un escudo equilibrado. Me Consejo poner las clavijas en el arduino, coloque la placa sobre él y hacer las marcas donde soldar.
A0: sensor
A1: potenciómetro (tiempo)
7: pulsador
6: enfoque
5:Shutter
")












