Paso 6: Cables de sensores de Sonar


El Pixhawk puede recibir información de dos sensores de sonar analógica, que se pueden utilizar para ayudar en un interior "altitud hold" modo o para el control de distancia de una pared. Revisa la página de ArduPilot en cableado y configuración de sensores de sonar para el Pixhawk y el planificador de misión.
Estos sensores son sensibles a la interferencia causada por los motores de los quadcopter. Para reducir las interferencias, debe hacerse un cable especial. Además de uno de los sensores de MaxBotix sugeridos en la guía del ArduPilot, necesitarás:
- cable blindado con por lo menos tres alambres (reciclados obras de cable USB)
- condensador de 100uF
- resistencia de 10 ohm
- tubería del encogimiento del calor
- conector de 5 posiciones para Pixhawk
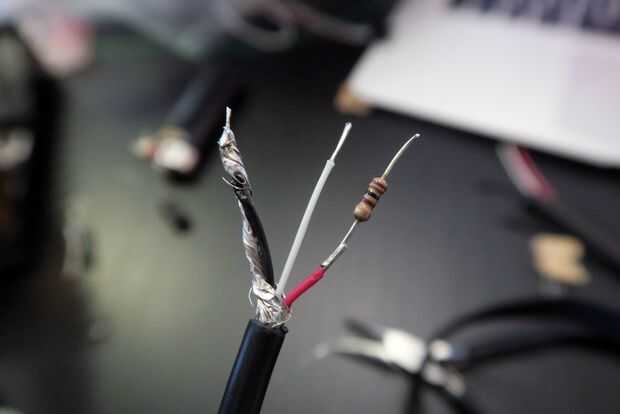
Pele y los tres cables, uniéndose a blindar al cable de tierra negro y colocar la resistencia en el extremo del cable rojo de la lata. Deslice un trozo pequeño de encogimiento de calor sobre la resistencia y la conexión de los cables.
Inserte el negro a tierra, la resistencia de la línea de alimentación a V + y el alambre blanco señal de salida analógica del sensor.
Antes de soldar, también colocar el condensador entre el poder y la tierra, asegurándose de que la pata larga va a tierra.
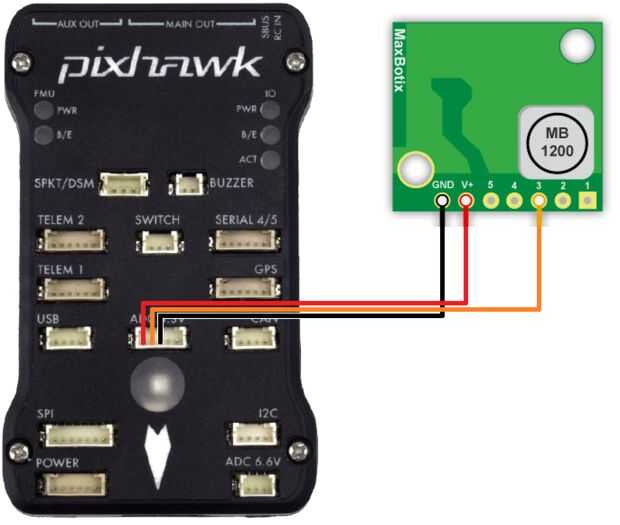
Los otros extremos de los cables correspondientes a los pines en el conector de 5 en el Pixhawk y el cable de acuerdo a este diagrama en el ardupilot sitiode la soldadura.
Aunque conseguimos sonar las señales que entran en la Pixhawk, no nos hasta ahora en cuanto a utilizar para controlar con éxito el piloto automático para IRIS + para este proyecto, tal vez puedes recoger donde nos quedamos!

")
")










