Paso 1: Resumen
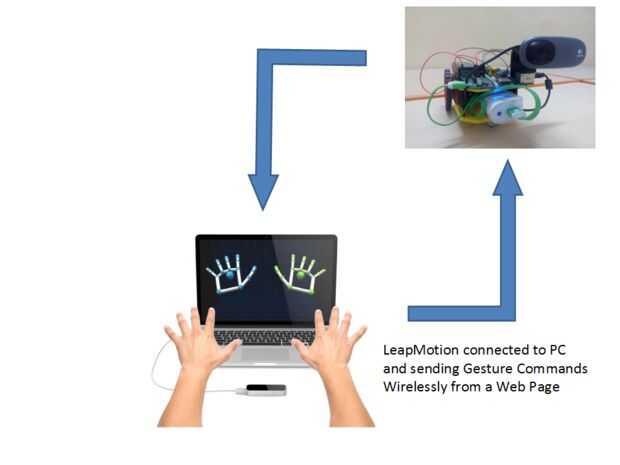
Este proyecto permite a un usuario controlar interactivamente un Robot utilizando gestos de la mano 3D a través de un movimiento de salto conectado a un PC.
El Raspberry Pi a bordo del Robot también tiene una Webcam USB que flujos de viven nuevo video al usuario que puede verse en un navegador Web. La biblioteca LeapMotion JavaScript incrustada en esta página web los procesos de gestos con las manos y envía señales de control hacia el Robot, que entonces se mueve en consecuencia.
El Raspberry Pi en el Robot se configura como un punto de acceso (AP modo) con la ayuda del dongle del USB WiFi conectado a él. Esto permite que nuestros PCs/dispositivos conectar con el Pi de frambuesa y control a través de una página web directamente. El Raspberry Pi también puede configurarse para funcionar en modo cliente, en donde se conecta inalámbricamente al AP del WiFi Router a la que ya están conectados los dispositivos de PC.
Este proyecto se basa en WebIOPi (http://webiopi.trouch.com/) que es un marco popular de IoT para Raspberry Pi. Con el Kit de IoT tejido incluido (a través del port forwarding en el Router), este Robot puede ser controlado remotamente o recibir datos desde cualquier parte del mundo.
Los siguientes componentes fueron utilizados para construir el proyecto:
- Frambuesa Pi B (100% delantero compatible con frambuesa Pi B +)
- Cámara Web Logitech USB (escasos 1,3 megapíxeles)
- Controlador de Motor L293D IC y el escudo de Breakout
- Adaptador USB WiFi para frambuesa Pi
- Banco de energía USB para frambuesa Pi
- Externos 4V / 1.5A batería para conducir los motores del Robot
")








")



