Paso 1: Abrir!



Hay dos motores de la C.C. en el robot. Esto es grande, dado que podemos controlar independientemente, permitiendo hacia delante, hacia atrás y girando el movimiento.
Comenzar desatornillando la tapa de la parte superior del robot. Los tornillos se encuentran en la parte inferior. Cuatro por la bahía de la batería y dos en la parte delantera.
Localice los dos motores de la C.C. cerca de la parte posterior, luego encender el soldador.
La soldadura de los motores de los puntos de contacto. Esto puede hacerse aplicando simplemente un poco hacia arriba la presión en el motor mientras calentar la soldadura - el contacto debe venir despegarse.
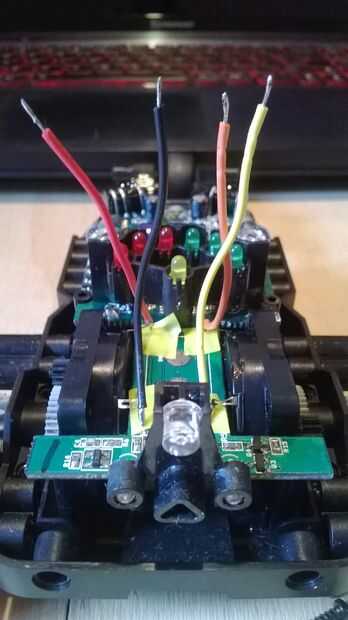
Una vez separado, retire los motores solo moviendo hacia fuera. Algunas de la soldadura de alambre (unos 10cm o más) en los contactos, teniendo cuidado de no para dañar los contactos del motor más bien frágiles.
Antes de poner los motores hacia atrás, cubra los contactos originales con alguna cinta eléctrica, al aislar la Junta vieja del actual enviamos forma de los motores. Luego apenas los motores de nuevo en la ranura.
Hay dos botones en la parte superior de la tapa. Tire de ellas hacia fuera. Esto creará dos agujeros. Encamine los cables a través de los orificios y fije la tapa en.













