Paso 3: El Robot (cámara)





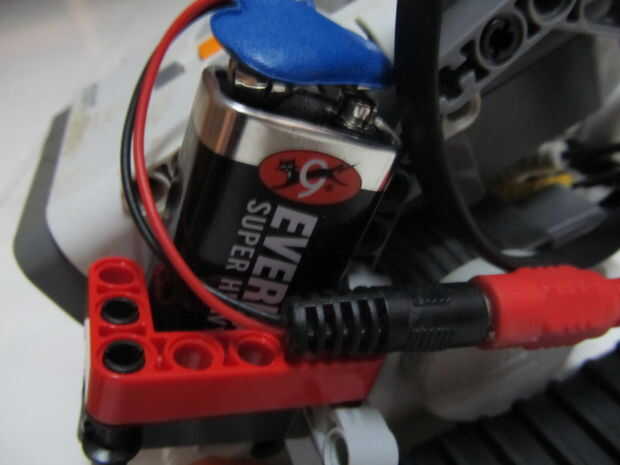
Puesto que mi cámara funciona una batería de 9 voltios hice una canasta simple para mantener al lado del controlador NXT.
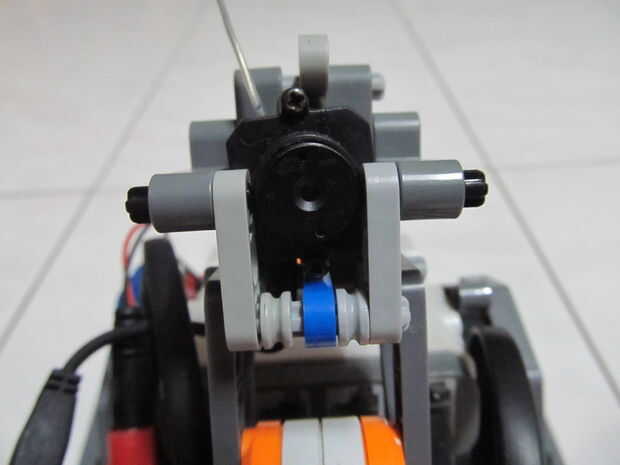
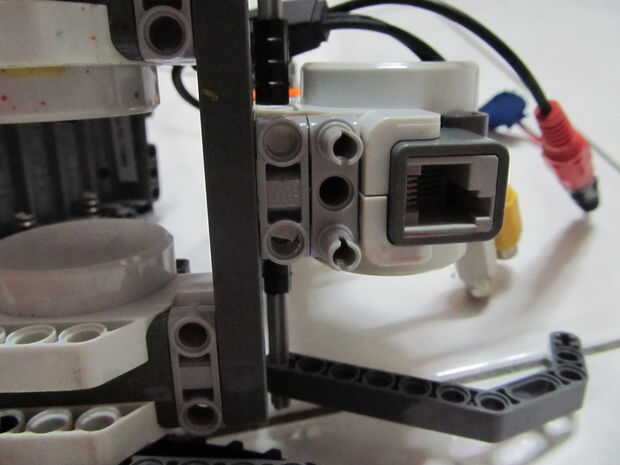
Ahora sólo alambre lo todo, utilicé el puerto A para el motor impulsor izquierdo, Puerto B para el motor de la cámara y Puerto C para el motor derecho. Ataré mi programa en el siguiente paso













