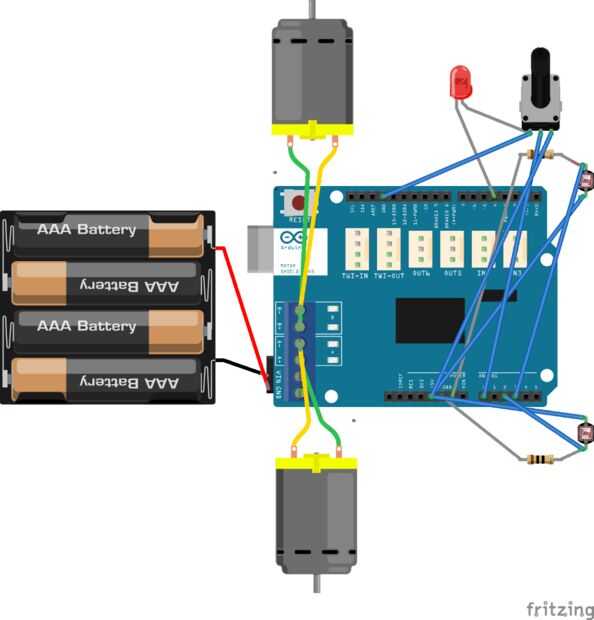
Paso 8: Paso 8: probar las conexiones nuevas al final del código
int LDR0 = A2; derecho
int LDR1 = A3; izquierda
int umbral;
int led1 = 4;
int potente = A0;
void setup() {}
LED y potenciómetro
pinMode (led1, salida);
pinMode (potente, entrada);
Configuración canal A - derecho
pinMode (12, salida); A pin inicia canal de Motor
pinMode (9, salida); A pin inicia canal de freno
Configuración canal B - izquierda
pinMode (13, salida); Clavija de iniciados Motor canal de B
pinMode (8, salida); Pin de B inicia canal de freno
LDR
pinMode (LDR0, entrada);
pinMode (LDR1, entrada);
Serial.Begin(9600);
}
void loop() {}
umbral = analogRead(potent);
int valueLDR0 = analogRead(LDR0);
int valueLDR1 = analogRead(LDR1) + 200;
Si (umbral > valueLDR0 + 50 & & umbral > valueLDR1 + 50) {}
digitalWrite (4, alto); encender led
digitalWrite (12, bajo);
digitalWrite (9, bajo);
analogWrite (3, 200);
digitalWrite (13, bajo);
digitalWrite (8, bajo);
analogWrite (11, 200);
Delay(300);
Si (valueLDR0 > umbral || valueLDR1 > umbral) {}
Si (valueLDR0 > valueLDR1) {}
derecho
digitalWrite (12, bajo);
digitalWrite (9, bajo);
analogWrite (3, 200);
izquierda
digitalWrite (13, bajo);
digitalWrite (8, bajo);
analogWrite (11, 20);
Delay(200);
analogWrite (11, 200);
Delay(500);
} else if (valueLDR1 > valueLDR0) {}
derecho
digitalWrite (12, bajo);
digitalWrite (9, bajo);
analogWrite (3, 20);
izquierda
digitalWrite (13, bajo);
digitalWrite (8, bajo);
analogWrite (11, 200);
Delay(200);
analogWrite (3, 200);
Delay(500);
}
}
} else {}
digitalWrite (9, alto); parada de motor derecha
digitalWrite (8, HIGH); motor izquierdo parada
digitalWrite (4, bajo); Apagar led
}
leer los valores
Serial.Print(valueLDR0);
Serial.Print("\t");
Serial.Print(valueLDR1);
Serial.Print("\t");
Serial.println(THRESHOLD);
}




 para principiantes")


")





