2 ruedas Self Balancing Robot con Arduino y MPU6050.Usar Arduino como el controlador y sensor de MPU6050 para controlar el equilibrio. Sólo añadir un modulo Serial Bluetooth simple y utilizar una aplicación de controlador Serial de Bluetooth para el
línea siguiente robot diseñado con Solidworks e implementado con arduino, ardumoto para el control de las ruedas y una barra de sensor con 8 sensores infrarrojos. Para cualquier duda con respecto a esta línea que sigue por favor dejadme un comentario
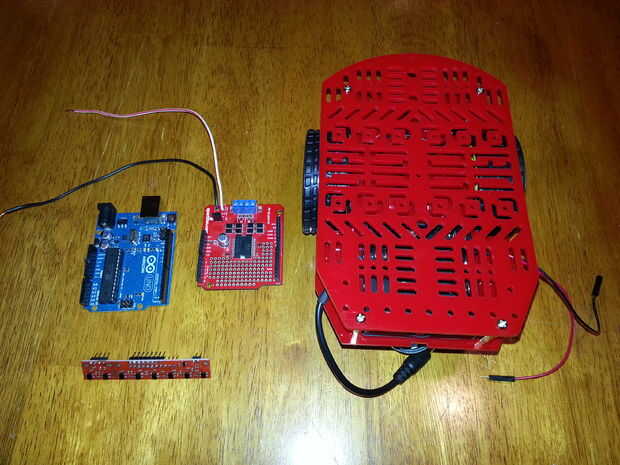
En este Instructable voy a mostrar cómo construir un robot controlado por voz 2WD . Aunque estoy controlando sólo los motores de la C.C. para mover el robot, el mismo enfoque puede utilizarse para control de voz motores paso a paso y servomotores, as
/*Edición 05/05/2016Hola chicos, he estado ocupado con la Universidad y no podía responder a comenta. La mayoría de ustedes quería el código y esquemas, hechas un poco mejor por lo que he hecho los esquemas en Eagle 7.2.0 y subido todo en Github.Aquí
L293D es un doble motor driver puente H circuito integrado (IC). Controladores de motor actúan como amplificadores de corriente ya que llevan un control de poca intensidad de señal y proporcionan una señal de corriente más alta. Esta señal de corrien
Si está buscando una manera de controlar un Arduino basado en dispositivos, esta instrucción le mostrará cómo hacerlo mediante la construcción de robots sencillos.La IoBot puede controlarse mediante la aplicación móvil y ordenador vía LAN o Cable USB
En este Instructable, vamos a construir una simple línea genérica después de arduinobot. Habrá un montón de espacio para la creatividad en este Instructable.El robot, en este tutorial, se alimenta de 4 pilas AA y es capaz de seguir la cinta aislante
Este Instructable demostrará cómo utilizar control PD (Proporational-derivado) de un seguidor de línea simple. El ejemplo utiliza el seguidor de línea desarrollado en el seguidor de línea básico Instructable:Se utilizarán los siguientes componentes:1
Hola chicos en este instructable veremos cómo hacer un obstáculo autónomo evitando Robot.This robot ha sido diseñado y programado de tal manera que evita la colisión. Básicamente, el robot se mueve hacia delante y siempre que detecte un objeto/obstác
Controlar iTunes y Vox los 2 jugadores más populares de la música en ordenadores mac con un arduinoPaso 1: Cosas necesariasArduino (estoy usando uno pero cualquiera debería hacer).Cable USB para arduino.IR recibir diodo.Control remoto universal IR.ca
Hola amigos,Aquí es un proyecto interesante por todo lo que mentes creativas que hay. Vamos a construir un auto RC android teléfono controlado.Nada podría ser más fascinante que los coches de controlados remotos. Éste utiliza Bluetooth para la comuni
Uno mismo-equilibrio Robot es muy interesante. Muchos amigos que nos rodean estaban tratando de hacer uno, pero encounted muchos desafíos, incluyendo la falta de las estructuras de fácil montaje, los circuitos electrónicos adecuados y los programas.
Cara en tiempo real de seguimiento se refiere a la tarea de localizar rostros humanos en un flujo de vídeo y seguimiento las caras detectadas o reconocidas. Hoy en día, hay muchas aplicaciones del mundo real de detección de rostros y otra técnicas de
Paso 1: Materiales necesarios Tamiya pista y rueda Coloque el conjunto ($7,95 en el chip)Kit de caja de cambios doble Tamiya 70168 ($9,25 en el chip)L298N doble puente en H ($3,65 en Amazon y podría ser mucho menor en ebay)Sostenedor de batería 4AA (








")


 con Arduino y Android(bluetooth)")


