Paso 3: Montaje de Robot...
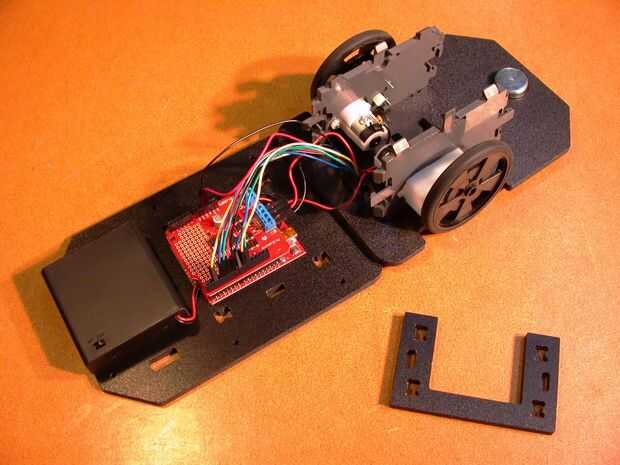

Después de montar el chasis siguiendo las instrucciones del chasis, fije la batería, shield Arduino y Ardumoto al chasis. Para el mago usamos zip lazos, el Gobbit tiene tornillos y Velcro incluido.
A continuación fije el sensor QTR para que sea un poco por encima de la superficie. Para el mago se utilizó alambre fino por lo que fue fácil ajustar la posición de los sensores pero lo suficientemente fuerte como para sostenerlo, ya que podría tener algún ajuste. Intentar establecer la separación entre la tierra y los sensores de IR (las pequeñas cajas negras en el tablero de cuartos) 1/8". También observe la orientación del sensor con las patas de la cabecera hacia el interior como se observa en el diagrama de cableado en el paso siguiente. De lo contrario, los pernos del sensor no coincidirá con el sketch de Arduino y se ejecutarán silvestres. El Gobbit goza de una ubicación predefinida para atornillar fácilmente el QTR en lugar que luego mantiene la orientación y distancia adecuada.







")


 con Arduino y Android(bluetooth)")


