Paso 4: cableado...
Un esquema detallado se puede encontrar aquí:
http://www.zagrosrobotics.com/files/ZagrosLineMazeFollowWiring_08232015a.pdf
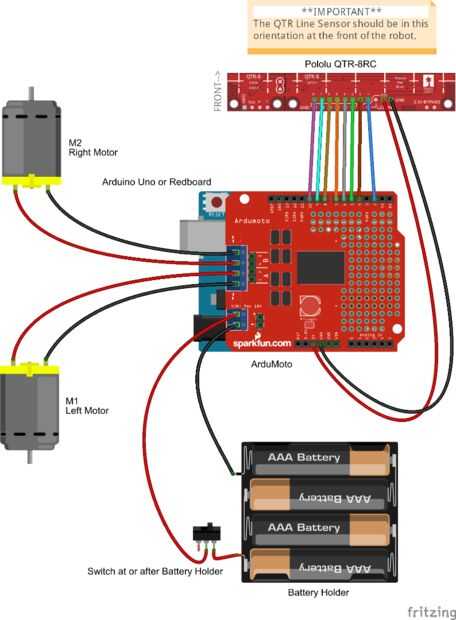
Conecte los siguientes cables o puentes:
- Pin Ardumoto Digital 2 - Sensor de QTR pin1
- Pin Ardumoto Digital 4 - Sensor de QTR pin2
- Pin Ardumoto Digital 5 - Sensor de QTR pin3
- Pin Ardumoto Digital 6 - QTR Sensor pin4
- Pin Ardumoto Digital 7 - Sensor de QTR pin5
- Pin Ardumoto Digital 8 - Sensor de QTR pin6
- Pin Ardumoto Digital 9 - Sensor de QTR pin7
- Pin Ardumoto Digital 10 - Sensor de QTR pin8
- Ardumoto GND - pin Sensor QTR GND
- Ardumoto 5V - pin QTR Sensor VCC
- Ardumoto Terminal 1 - cable negro del motor izquierdo
- Ardumoto Terminal 2 - cable rojo del motor izquierdo
- Ardumoto Terminal B 3 - cable negro del motor adecuado
- Ardumoto Terminal B 4 - cable rojo del motor derecho
- Ardumoto Terminal VIN (+) - cable positivo/rojo de soporte de la batería (conectado)
- Ardumoto Terminal VIN (-) - cable negativo/negro del portapilas
Nota: El Pin Digital 3 es saltado y utilizado por el conductor del motor Ardumoto. Ardumoto también utiliza pines 11, 12 y 13.
Importante: Mientras que el Gobbit debe ejecutar correctamente con las conexiones señaladas, cambio de los cables del motor rojo/negro, o el lado B de la Ardumoto puede ser necesario con el mago.







")


 con Arduino y Android(bluetooth)")


