Paso 1:

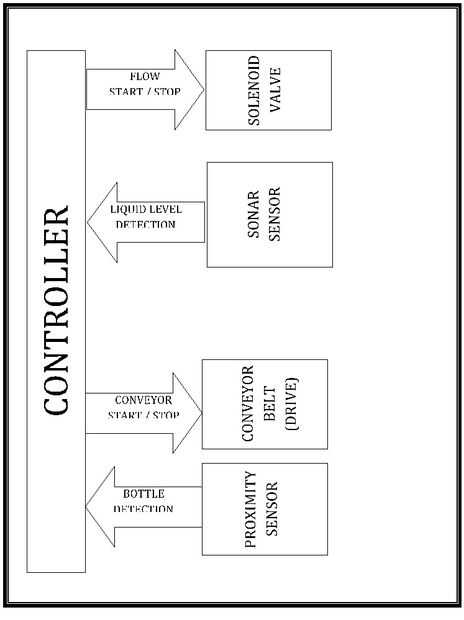
El objetivo del proyecto es detectar la presencia de una botella de cristal en la estación de servicio, llenar el líquido de la botella a cierta altura y hacia delante de la botella para su posterior procesamiento. El proyecto consiste en una cinta transportadora, para el llenado de botellas a un determinado nivel de líquido, impulsado por un motor de DC a una velocidad preajustada constante. El motor va seguir conduciendo el transportador hasta que un sensor de infrarrojos (IR) detecta la presencia de un derecho de la botella por debajo de la estación de servicio. El sensor de infrarrojos envía la señal al controlador que a cambio envía una señal de que el motor se detenga. Tan pronto como se detiene el transportador, el actuador para el relleno, es decir, una válvula de solenoide, enciende el relleno. El nivel de líquido en la botella continuamente se monitorea utilizando un sensor de ultrasonidos. Un preset requerido nivel del líquido ya se introduce en el controlador. El controlador compara el nivel instantáneo de los niveles prefijados de requerido. Tan pronto como se alcanza el nivel deseado, la válvula solenoide se desactiva el relleno. Cuando se detiene, el transportador empiece a funcionar móvil por lo que puede llenar la siguiente botella.
")




")







