Paso 2: Construcción de la parte física del seguidor de línea

Tienes un montón de espacio para la creatividad al construir el robot. Simplemente tienes que seguir tres directrices para garantizar que el robot funciona con el código que escribiremos más adelante.
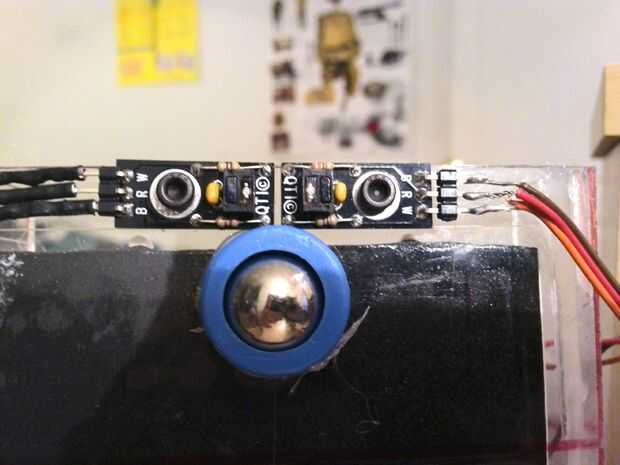
En primer lugar, se colocarán al lado de los dos sensores QTI.
En segundo lugar, los sensores QTI deben colocarse en frente o en línea con las ruedas. El robot no seguirá la línea bien, si los sensores QTI están detrás de las ruedas.
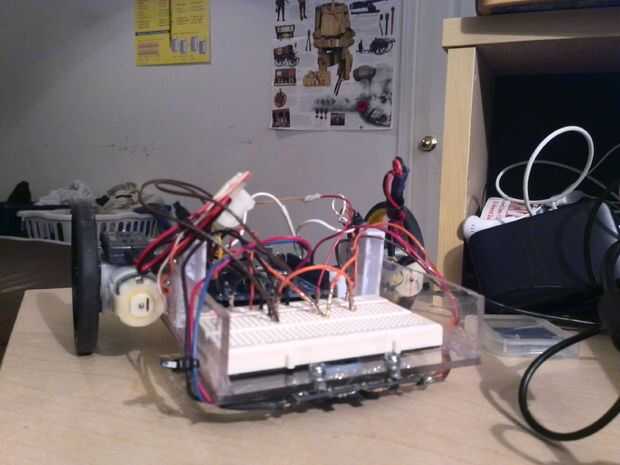
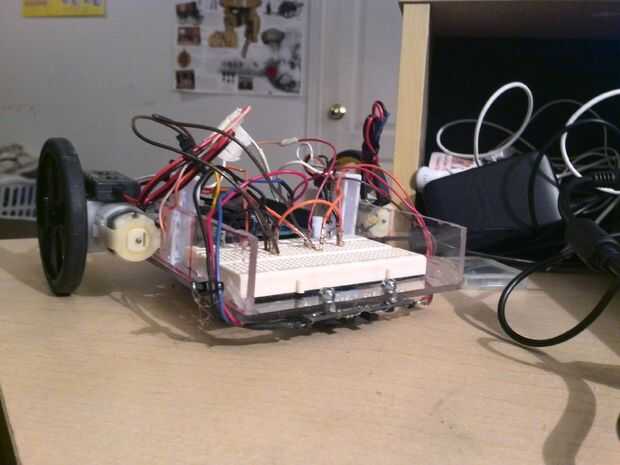
En tercer lugar, la mayoría del peso debe estar entre las ruedas motorizadas. Esto es para asegurar que el robot no se ve afectado por peso al girar. Si usted está construyendo un seguidor de línea simple, es muy probable que el soporte de la batería será la parte más pesada del robot. Se recomienda colocar la batería entre las ruedas.
El resto del diseño depende de tu imaginación. Puede incorporar componentes adicionales, como LEDs y zumbadores.
Hice un simple 4x6x1in U canal, de plexiglás, en el que yo montar todas las piezas.









")

")
 con Arduino y Android(bluetooth)")
