Paso 2: diseño
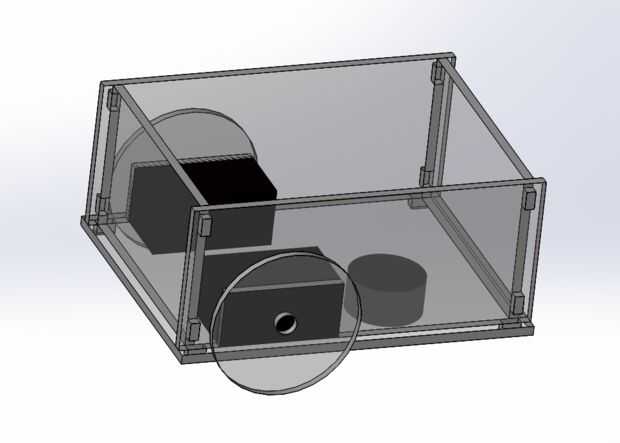
Un simple cuerpo fue diseñado para ser cortado de 1/8 acrílico usando un cortador láser. Esquemas de SolidWorks y vector están disponibles más abajo. El cuerpo del robot fue diseñado alrededor de los componentes que fue requerido para adaptarse, por lo tanto el ancho del cuerpo se determinó en gran medida por el ancho de los servos utilizados para las ruedas, y la longitud fue elegida para montar la placa de Arduino Uno, batería de servo y batería de Arduino. Se decidió utilizar un simple punto fijo para el pivote trasero, en la forma de un 1/4" perno de la cabeza del botón, porque el robot fue diseñado para correr en una superficie plana, dura, que no se anticipó a plantear problemas a un método simple de soporte trasero.












