Paso 6: Ensamble de regulador
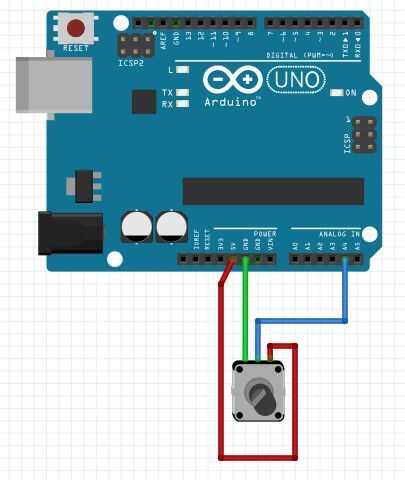
Porque también se desea el control manual del robot, un controlador simple fue creado usando Potenciómetros rotativos lineales, el circuito que se muestra en la imagen. Un potenciómetro solo se muestra para mayor claridad, sin embargo el segundo potenciómetro fue conectado de manera similar, con la excepción de que la señal pin conectado al Arduino pin A5. El controlador se estableció entonces en el código de Arduino tal que un potenciómetro controla la velocidad de los motores, y el otro potenciómetro controla el giro. Esto se muestra en el siguiente paso.












