Paso 10: Ajuste el control del PID usando la aplicación para Android

En el código anterior, usted puede encontrar en la pestaña de "robotDefines.h" las siguientes definiciones para las constantes a utilizar con el control PID.
flotador de Kp = 50;
flotador de Ki = 0;
flotador de Kd = 0;
Como se explicó en el paso anterior, la mejor manera de definir la constante correcta para usar con el controlador PID es utilizando la metodología del "Prueba-error". El lado malo de eso es que se debe volver a compilar el programa cada vez que se debe cambiar. Una forma de acelerar el proceso es utilizar la aplicación para Android para enviar las constantes en la fase de configuración.
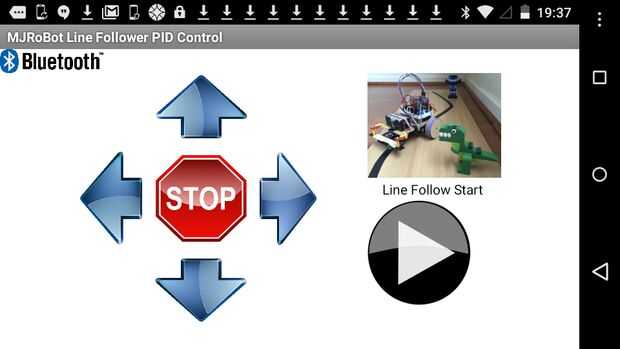
Desarrollé una aplicación Android exclusivamente para eso. en definitiva:
- Existen los comandos manual tradicionales:
- FW, BW, izquierda, derecha y Stop donde la aplicación le enviará respectivamente el módulo de BT: 'f', 'b', 'l', 'r' y de '.
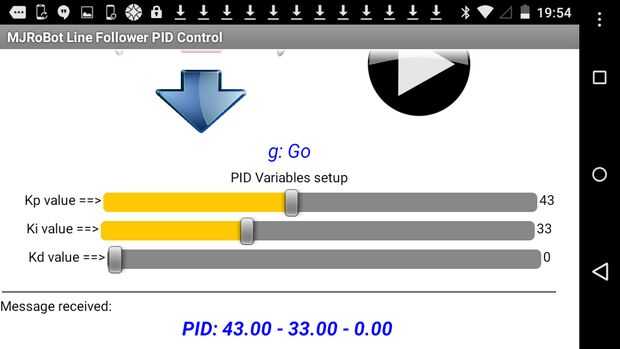
- También 3 deslizadores se incluyó, uno para cada constantes del PID:
- KP: "p/XXX"
- Ki: "i / XXX"
- KD: "d/XXX"
- Donde "XXX" es un número entre 0 y 100.
- Se incluyó un botón adicional que funciona exactamente como el botón conectado encendido el Arduino Pin9. Usted puede utilizar uno o el otro, no importa.
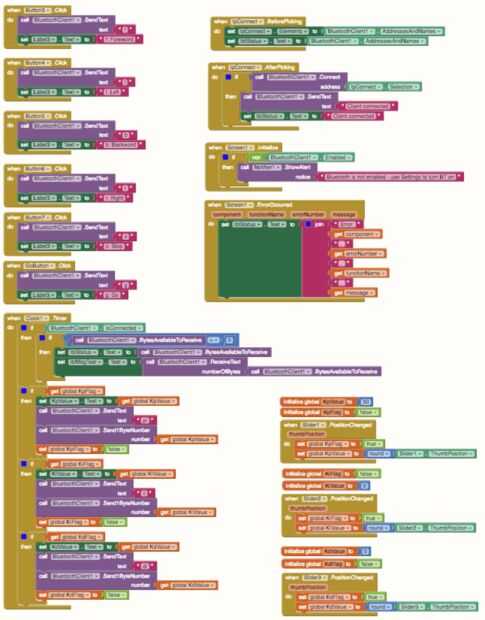
A continuación que usted puede encontrar el archivo .aia que puede modificarse en AppInventor de MIT y el archivo .apk para instalar directamente en tu dispositivo Android.

")

 - neurálgico Fablab")





 con Arduino y Android(bluetooth)")


