Paso 2: Configuración de los motores
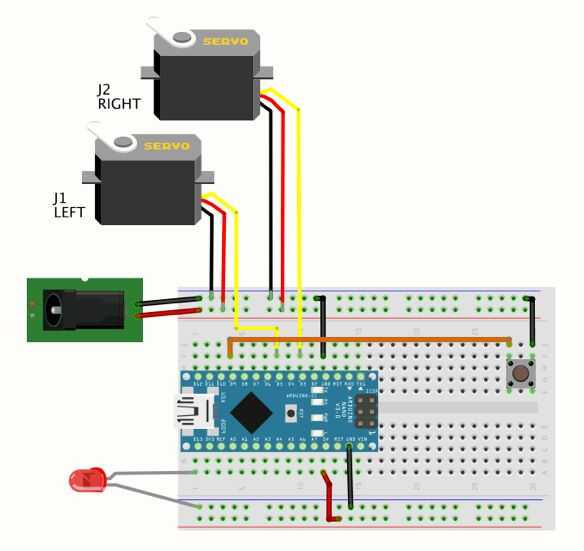
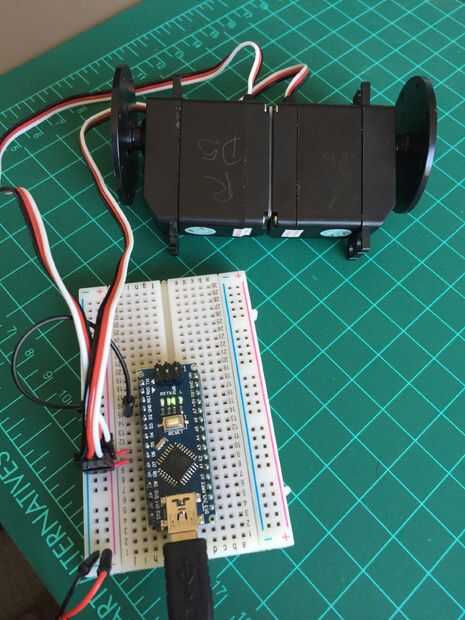

Para los motores servos continuadas 2 (SM-S4303R) fueron utilizados. Se "pegarse" juntos formando un bloque único y sólido como se puede ver en la foto (uso el 3M mando tira, pegamento o cinta de doble cara). Los servos se ejecutarán en una velocidad dependiendo de la anchura de pulso recibida en la entrada de datos. Para este servo, el ancho de pulso va de 1.0ms a 2.0ms (otros servos pueden trabajar con ancho de pulso diferentes). Buscar en detalles:
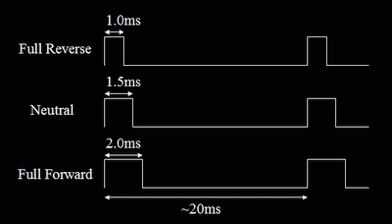
- Un pulso de 1.5ms colocará el servo en posición neutra, o "parado".
- Un pulso de 1.0ms mandará el servo a toda velocidad (unos 70 RPM) en una dirección y 2.0ms toda velocidad en la dirección opuesta.
- Del pulso entre 1.5ms, 1.0 y 2.0ms o 1.5ms, generará velocidad proporcional.
Lo primero que debe hacer, es enviar un 1500ms pulso para verificar si los motores se "paran". Si no, los servos deben ajustarse a parada completa (busque el perno amarillo, abajo el servo). Por supuesto si el servo no tiene este ajuste, valor de cambio "1500ms" probar hasta conseguir el punto.
El siguiente código de Arduino puede hacer el trabajo:
Biblioteca de servo #include / / esta línea de código debe ser cambiado, mira por favor el código adjunto
Servo leftServo;
Servo rightServo;
Void setup()
{
leftServo.attach(5);
rightServo.attach(3);
leftServo.writeMicroseconds(1500);
rightServo.writeMicroseconds(1500);
}
void loop()
{
}

")

 - neurálgico Fablab")





 con Arduino y Android(bluetooth)")


