Paso 3: Montaje del cuerpo y motores para la prueba de movimiento
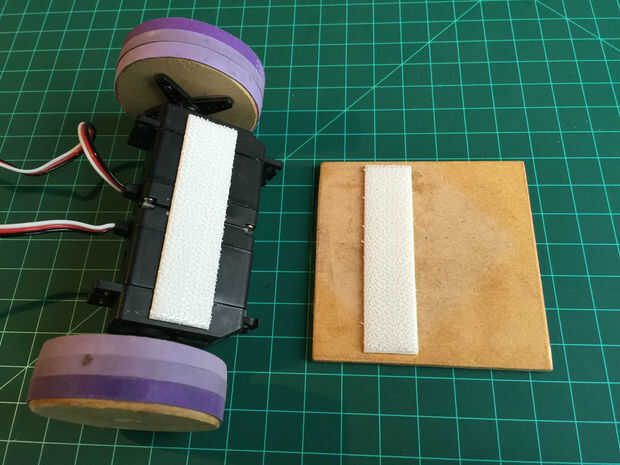

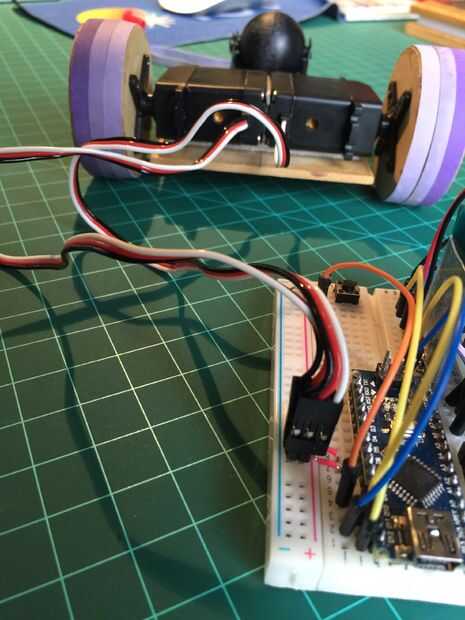

- Con la tira 3 de marco de comando M, fijar los 2 Servos a la de la pieza de madera cuadrada.
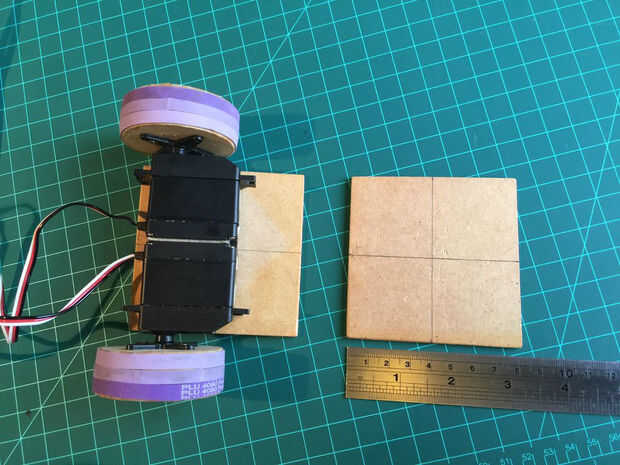
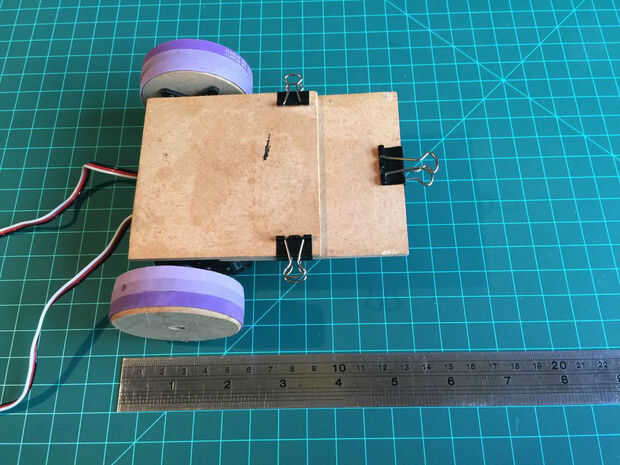
- Fije la madera cuadrada 2 º a la anterior con los Clips de la carpeta. Ajuste la longitud de la plataforma a sus necesidades.
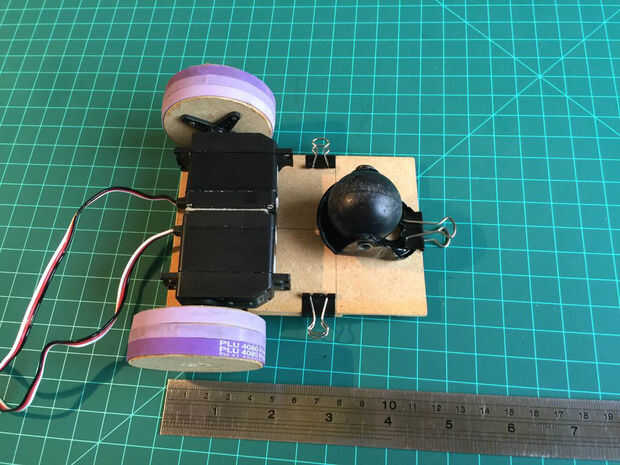
- Fije la rueda de la bola usando el Clip Binder.
- La fuente de alimentación para los motores vendrá de uno de los 5V de las baterías. Este conjunto de batería se instalará entre la placa y el chasis.
- Conectar la batería para ser utilizada con servos: dejó a uno de red laterales exclusivamente para fuente de servos
- Conectar el Arduino Nano a la placa
- Conectar el GND de la red eléctrica a GND de Arduino.
- Conecte los Servos al Arduino: izquierda == > Pin 5; DERECHO == > Pin 3
- Conectar el LED al Pin 13 de Arduino
- El botón conectar Arduino Pin 9
Tenga en cuenta que por la forma en que los servos están montados (en oposición) el rango de velocidad es:
- Velocidad de avance de Servo derecho va desde 1, 500us (detenido) a 2, 000us (full velocidad)
- Velocidad de avance del Servo de la izquierda va desde 1, 500us (detenido) a 1.000 (velocidad completa)
Un LED externo es agregar al pin13, para propósitos de señalización y prueba (puede utilizar el LED interno del Arduino, en cambio un externo si quieres, pero toma en cuenta que será difícil de ver en medio de los cables).
También un botón está conectado al pin 9. Este botón es muy útil para propósitos de la prueba y para comienzo del robot.
Por ejemplo:
{while(digitalRead(buttonPin))}
motorTurn (a la izquierda, 500);
motorTurn (la derecha, 500);
Tenga en cuenta que las 2 líneas que se mando el Robot gire a la izquierda, esperar 500ms y gire a la derecha sólo ocurrirá después de pulsar el botón (buttonPin = 0). Antes de eso, el programa se detendrá en el bucle infinito.
El siguiente código, se puede utilizar como base para una prueba completa del motor (adelante, atrás, Full stop, gire a la izquierda, gire a la derecha). Si es necesario se deben ajustar los retrasos para el ángulo requiere a su vez en función de sus motores (también, a veces a la izquierda y derecha pulso valores deben ser un poco diferente para compensar cualquier falta de equilibrio de los motores.

")

 - neurálgico Fablab")





 con Arduino y Android(bluetooth)")


