Paso 2: diseño
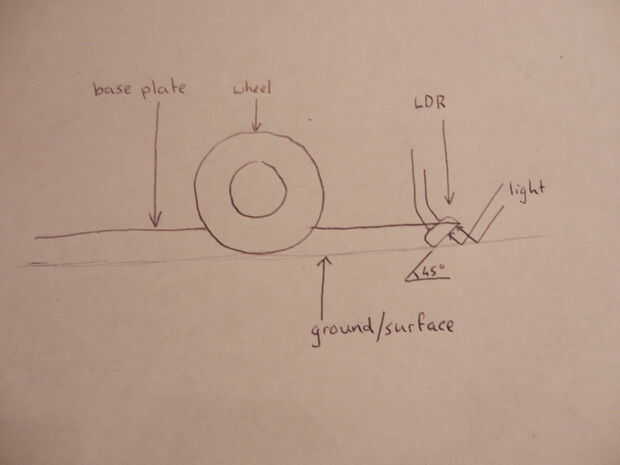
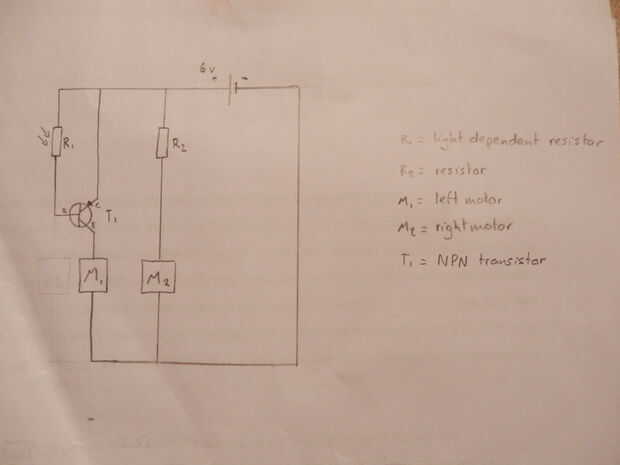
el motor adecuado está conectado en serie con un LDR y un transistor. el LDR se coloca en un ángulo de 45 grados a la superficie y recibe la luz reflejada por esta superficie. Cuando la superficie es de color negra, menos luz se reflejaban sobre la LDR, cuando la superficie es blanca, más luz entra en el LDR.
la resistencia de la LDR varía dependiendo de la cantidad de luz entrar en él. (varie de LDR mayoría entre 3000 ohms cuando la luz y 10000 + ohmios cuando oscuro) esto significa que la corriente es variada saliendo de la LDR. un transistor se utiliza para el "topetón-para arriba" esta corriente para que sea suficiente para impulsar el motor. por lo tanto el motor de la derecha será "alto" (mucha corriente) cuando en una superficie ligera y una voluntad que se "baja" (no actual) cuando en una superficie oscura. el izquierdo recibe motor que una constante actual permanece siempre en sin embargo está conectado en serie con una resistencia que lo hace gira más lento que el motor adecuado cuando el motor adecuado es "alto". Esto significa que el robot sube en zig-zag a lo largo de una línea negra.






")






