Línea siga robot, ninguna programación requerida (3 / 6 paso)
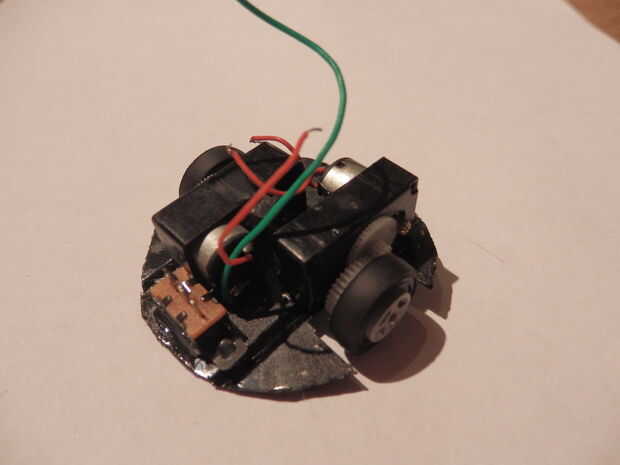
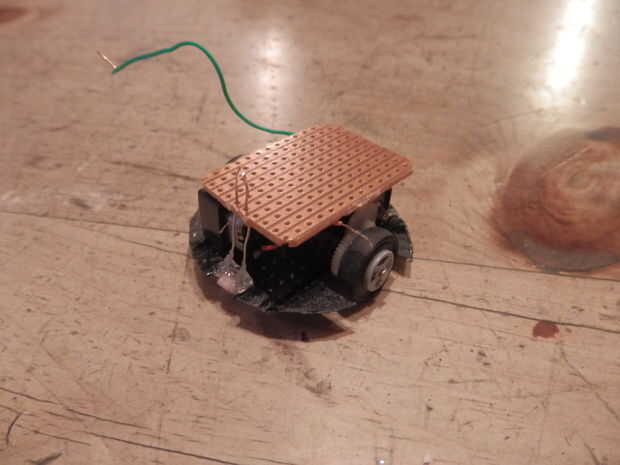
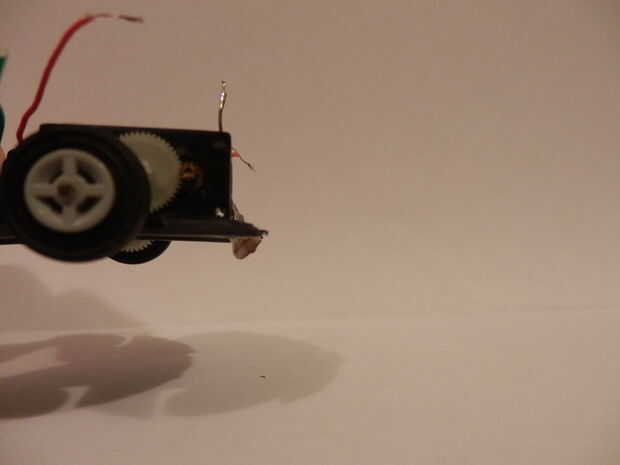
Paso 3: montaje
mi placa base es una ronda de pice de plástico recortadas de un recipiente de plástico. cortar ranuras para las ruedas, interruptor y LDR. el motor y los módulos de engranajes simplemente se unen con pegamento caliente junto con el interruptor. el LDR es un poco más complicado ya que tiene que ser montado en un ángulo de 45 grados a la tierra y más sobresalen del thebottom de la base por la misma cantidad que las ruedas ya que también funciona como una rueda de duende para mantener estable el robot. se muestra una foto de cómo mina se colocó en la parte inferior del robot. también decidí cortar un pequeño trozo de PCB para mis componentes en la soldadura. Esto sentó muy bien sobre los montajes de motor.
IntroducciónEste instructable muestra cómo utilizar el libre pfodDesigner disponible en GooglePlay para diseñar un sistema Android menú con submenús para dispositivos compatibles con Arduino.El tutorial es adecuado para principiantes. No se requiere
Actualización: un usuario pidió menú apoyo. pfodApp siempre admite submenús pero he agregado submenús al pfodDesigner. El instructable diseño un sistema de menú Custom muestra cómo utilizar pfodDesigner para crear un menú con submenús que mostrará en
Actualización 02 de junio de 2016: Revisado todo el código para nuevas bibliotecas de la Junta y pfodApp V2 utilizando pfodDesignerV2 . El resultado es velocidad y fiabilidad de conexión mejorada.Este tutorial cubre 5 cinco módulos de Bluetooth Low E
IntroducciónEste Instructable muestra cómo utilizar la aplicación gratuita, pfodDesigner, para diseñar un menú en tu móvil Android que se pulsará una salida en tu placa Arduino sin tener que escribir ningún código en absoluto. El pfodDesigner genera
IntroducciónEste Instructable muestra cómo agregar sonido y elementos de menú para tu pfodApp que destella controlado dispositivo Arduino. Ninguna programación Android es necesaria, la pfodDesigner genera el sketch de Arduino para usted.pfodApp ya so
== > Este proyecto obtuvo el 2 º premio en concurso de robótica de 2016.Muchas gracias por los votos ;-)El propósito de este proyecto es construir un Robot seguidor de línea con control PID. También utilizamos un dispositivo Android para configurar f
Este Instructable demostrará cómo utilizar control PD (Proporational-derivado) de un seguidor de línea simple. El ejemplo utiliza el seguidor de línea desarrollado en el seguidor de línea básico Instructable:Se utilizarán los siguientes componentes:1
Creación de una galería de Raspberry Pi es realmente muy fácil, gracias a una distribución de Linux llamada RetroPie.No necesitas hacer ninguna programación o configuración, sólo tiene que instalar la imagen en una tarjeta SD. Esto le permitirá usar
línea siguiente robot diseñado con Solidworks e implementado con arduino, ardumoto para el control de las ruedas y una barra de sensor con 8 sensores infrarrojos. Para cualquier duda con respecto a esta línea que sigue por favor dejadme un comentario
HolaSoy Ajinkya DixitEste es mi primer proyecto de robótica - "La línea TRACER ROBOT sin microcontrolador"Estos robot no contiene ningún tipo de microcontroladores, en lugar de otro utiliza solo circuito integrado (IC) y algunas otras piezas de
esta es una guía bastante clara de cómo construir una línea que sigue el robot. utiliza luces, luz resistencias dependientes (LDRs), un arduino y un chasis de boe bot (funcionará cualquier chasis robot con 2 servos de rotación continua). Lee los sens
Aprender a construir una línea que sigue el robot usando la ActoBitty y un Arduino. A continuación es la lista de hardware necesario para completar este build.Hardware requerido1 x Kit de Robot Actobitty 2 ruedas (https://www.servocity.com/html/actob
Si alguien quiere empezar a construir robots, este robot es para ellos, es fácil hacerlo, conocimientos de programación no se requiere un poco de la electrónica de conocimiento es suficiente para terminar este robot.Ingredientes clave:1 x chasis2 x s
Aquí en este instructable voy a mostrarte cómo hacer la línea del mundo más simple siguiente robot. Más simple en términos de número de piezas y la complejidad del circuito.La mayoría de la línea después de robots en internet utilizan complejos circu







")






