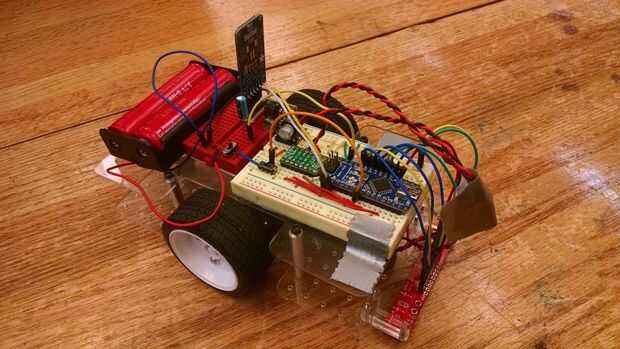
Este robot utiliza un algoritmo de control PID para seguir autónomamente un camino negro sobre un fondo blanco. Utiliza una matriz de ocho sensores de reflectancia IR para determinar la posición del robot en la línea, y el microcontrolador Arduino Nano calcula las medidas adecuadas para que siga avanzando en la línea. Este proyecto cuesta ~ $50, pero ya tenía un arduino, así que agregamos sobre otro $25 si usted necesita comprar uno.
Hemos completado este proyecto para nuestra clase de Mecatrónica en la Universidad de Rowan.





")





 Básicos Arduino Robot buscador de luz!")

