Paso 4: Sensor de matriz
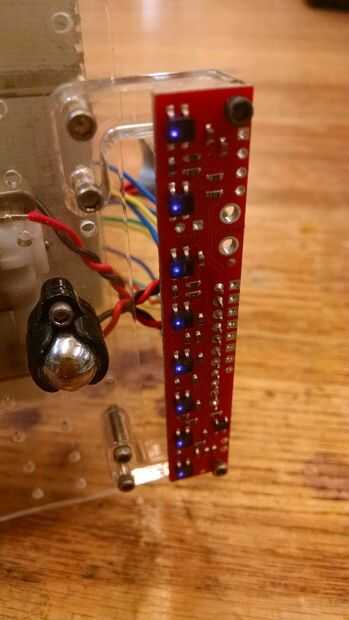
El sensor de matriz actúa como los ojos del robot. Hay ocho sensores en la parte frontal del robot que puede distinguir el negro del blanco. Partiendo de que los sensores ver negro y blanco que, Arduino puede encontrar la posición del robot sobre la línea.
Si el robot trató de permanecer totalmente en negro, no sería capaz de diferenciar derecha de izquierda 90 grados. Por lo tanto, está programado para permanecer en el borde de la línea.
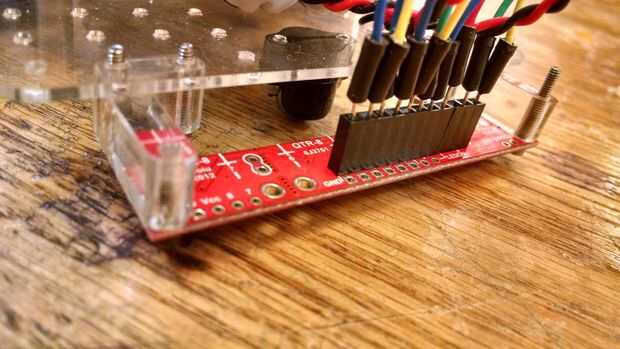
La matriz del sensor está montada sobre dos láser acrílico soportes con tornillos de #2-56. Los archivos de estas partes se unen.
Las clavijas de conexión del sensor están marcados 1 a 8 y necesitan estar conectados a sus correspondientes pines analógicas en el Arduino, etiquetado A0 a A7. El pin de Vcc se conecta a 5V y el pin GND está conectado a tierra. El diagrama del circuito completo se explica en el siguiente paso.





")





 Básicos Arduino Robot buscador de luz!")

