Paso 5: Diagrama del circuito
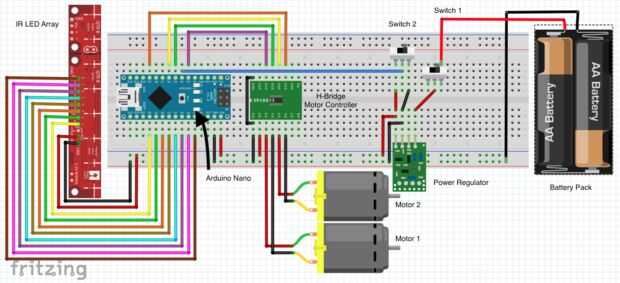
Conectar los sensores es un proceso sencillo cuando se mira en el esquema anterior. Todos los cables rojo significan potencia o voltaje positivo, con el rojo oscuro siendo baja tensión después del regulador de potencia y el rojo brillante ser de alto voltaje de batería. 1 enciende el sistema, suministrando el voltaje de la batería pack en el pasador exterior del interruptor a la patilla central del interruptor y de allí a la Vcc (pin 4) en el regulador de potencia el interruptor. La salida Vcc (pin 1) del regulador envía un voltaje bajo a la Junta para el resto del circuito de alimentación mientras la batería suministra la tierra. Interruptor 2 determina si es o no el coche en modo manual o automático. Este interruptor se suministra con energía desde el regulador en un lado y de la tierra en el otro. El pasador central interruptor 2 está conectado al pin D4 en el Arduino Nano para el modo de comunicarse.
El controlador del motor se suministra con suelo de la Junta a los pines 1 y 16. Energía se envía al pin 2 y los cables de alimentación del Motor 1 y 2 se conectan a los pines 3 y 5 respectivamente. Tierra de cada motor se conecta a los pines 4 y 6 respectivamente. El regulador del motor recibe las señales de los pines de Arduino D9, D6, D5 y D3 conecta a los pines del controlador 11, 12, 13 y 14 respectivamente.
El Arduino da comandos al controlador basado en las señales que recibe de la Junta de arreglo de discos. Cada LED de infrarrojos envía una señal a la Arduino a través de sus pines analógicos. Las clavijas de gama LED 1, 2, 3, 4, 5, 6, 7 y 8 están conectadas a pines analógicos A0, A1, A2, A3, A4, A5, A6 y A7 respectivamente. Alimentación y tierra se suministran a la Junta de arreglo de protoboard.





")





 Básicos Arduino Robot buscador de luz!")

