Paso 6: Afinar el lazo
Más información canbe encontrado en muchos libros y Web incluidos aquí:
http://en.wikipedia.org/wiki/PID_controller
Revisión rápida de PID:
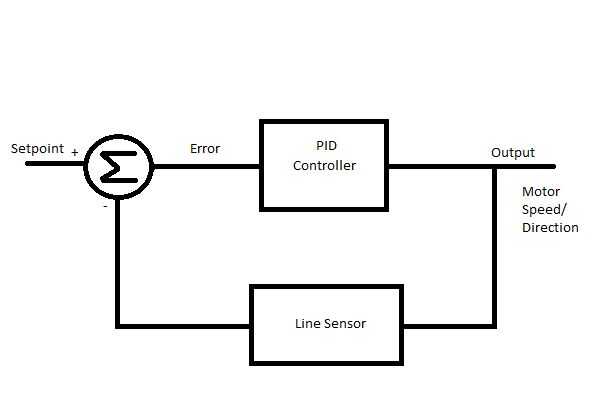
El controlador PID basic se compone de tres términos y cada uno tiene una función específica:
Término proporcional
El término de proporción es lo que determina el tiempo de subida del lazo de control o cómo rápidamente alcanzará el punto de referencia.
El término derivado se utiliza reducir el sobrepaso o cuánto el sistema sobre corrige.
El término integral se utiliza elminate el error de estado estacionario, requerido por el término de proporational. En este ejemplo no utiliza el término integral ya no estamos preocupados por el error de estado estacionario y puede complicar el templar del lazo.
Para este ejemplo, se utiliza solamente control de PD.
Un enfoque es definir la variable kd a 0 y poner a punto el término kp solo primero. KP de 1 es un buen lugar para empezar.
Si el robot reacciona demasiado lentamente, aumente el valor. Si el robot parece reaccionar rápido y se vuelven inestables, disminuir el valor.
Una vez que las respuestas del robot razonablemente, afinar la parte derivada del lazo de control.
Primero establecer el kp y kd valor cada 1/2 del valor de kp. Por ejemplo, si las respuestas del robot razonables con un kp =.8 y coloque kp =.4 y kd =.4 para empezar.
Aumentar la ganancia de kd (derivado) para disminuir el sobrepaso, disminuir si el robot se convierte en inestable.
Uno de los componentes del lazo a considerar es la velocidad real de la muestra/del lazo. Esta acelerando o desacelerando este puede hacer una diferencia significativa en el rendimiento del robot. Se establece por la instrucción delay al final de la subrutina loop().
Este video muestra el robot en el centro de afinación. Aviso la ondulación en cada tramo recto, probablemente significa la ganancia es muy alta y debe reducirse el kp.













