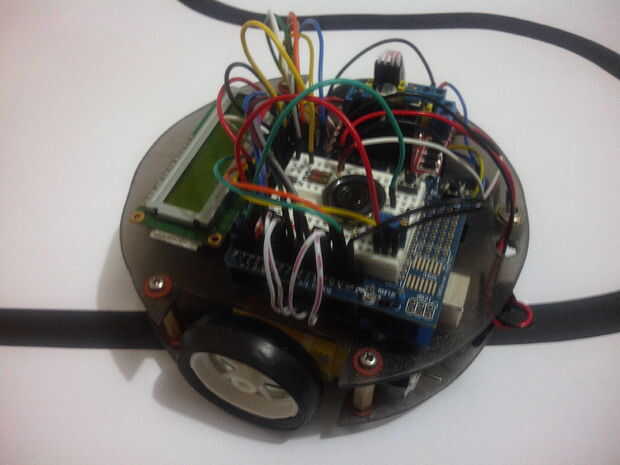

Sensores de infrarrojos colocados en la parte delantera del chasis supervisará cuando nuestro Robot está sobre una línea negra o cuando está sobre un fondo blanco.
En este proyecto vamos a utilizar el chasis apropiado redondeado al Robot.
En caso el robot en la línea negra, siempre seguirá adelante, y en el caso de la línea y caer en una zona blanca, determinará si se va a corregir a la izquierda o la derecha y así permanecer en la línea negra.
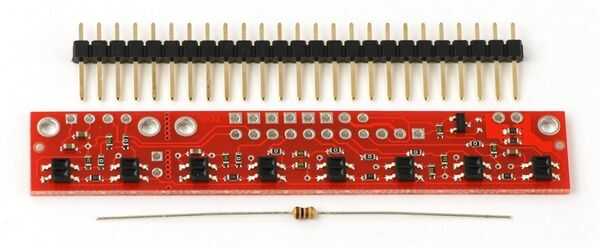
Los sensores que se utilizará es el sensor de infrarrojos serie QTRx8RC chip (también llamado sensores de reflectancia), que consta de ocho sensores (sólo cinco se utilizan) QRE1113GR.
Esta matriz tiene una salida digital y puede ser administrado usando la biblioteca apropiada del chip, para determinar fácilmente la posición de la línea en relación a los sensores.
Este conjunto de sensores se puede romper en una matriz con 6 sensores y otro con 2 sensores.
Para obtener más información acerca de la matriz de sensores, visite:
http://www.Pololu.com/catalog/Product/961
En este primer proyecto vamos a utilizar un control de materia prima para nuestro robot, es decir nos preocupa mantener el robot siguiendo la línea...
El Robot se corren en una pista y se nota que los movimientos del robot será un tanto "robóticos", es decir: no muy suave, pero irregular.
Ver http://arduinobymyself.blogspot.com.br para más proyectos.

")











