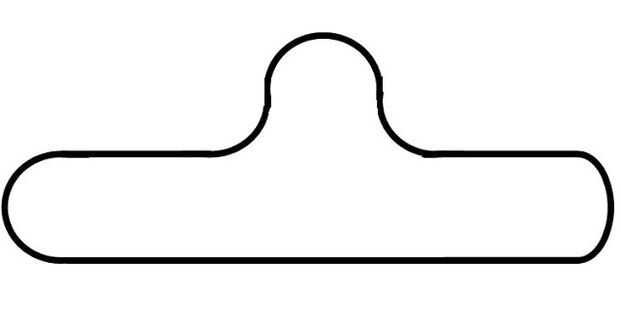
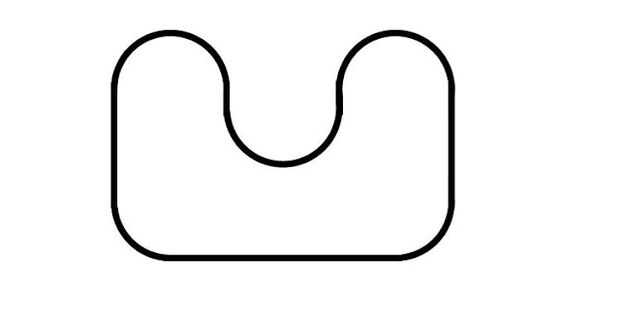
La pista se hará de un pedazo de cartulina blanca y cinta aislante negra. La curva se debe a un diámetro mínimo 6" o mayor. A continuación tenemos dos ejemplos de pista
LINUSBot - Robot seguidor de línea - con control PIDLINUSBot - Control PIDSe trata de un complemento de la primera "instructables" de LINUSBot (línea que sigue el robot).Ahora el robot tiene control de movimiento realizado por un controlador PID
Hola chicos en este tutorial vamos a ver cómo hacer un robot seguidor de línea simple con solo sensor infra-rojo.Paso 1: Introducción:Generalmente para los principiantes en robótica trata de tu primer robot para jugar ya que este robot tiene algunas
este es mi segundo Robot seguidor de línea y como su nombre sugiere, es un robot cuyo objetivo es siguiendo una línea. Este robot se puede utilizar en concursos donde un robot debe seguir un recorrido delimitado por una línea negra sobre un fondo bla
aquí expliqué un robot seguidor de línea sin microcontroladores o Arduino. Este es un proyecto muy simple para principiantes. Aquí tienes la necesidad de no tener ningún conocimiento de programación. así que deja probarlo...Paso 1: Recoger el materia
Con el fin de divertirse un poco más con mi Makeblock mBot en modo de seguidor de línea, he creado este mapa personalizado con un puente de cartón.Realmente es bastante simple hacer un mapa para un robot seguidor de línea. Lo que te voy a mostrar aqu
Fue tanto tiempo desde mi última publicación Instructables. En realidad, he intentado hacer proyecto muy popular pero con nuevas herramientas y una fácil manera sobre todo en la codificación. Trabajé en un robot seguidor de línea que seguir una línea
Hola a todos,Si usted está interesado en hacer un robot sencillo que sigue la luz, o debo decir que camina hacia una fuente de luz, entonces estás en el lugar correcto...Se puede ver robot en los dos videos de youtube en los accesorios.He hecho este
Crear un robot con ATtiny13A es un reto, que sólo tiene 1k flash y 5 pernos del IO. Pero es lo suficientemente bueno para crear un seguidor de línea pequeños.YouTube video de demostración: https://youtu.be/00PYO1ThzEAPaso 1: Preparar el hardware MCUM
las figuras arriba muestra la idea básica de cualquier robot, donde tenemos algunos insumos y dispositivos de salida conectados al cerebro y algunas salidas controladas por el cerebro. En nuestro caso tenemos el Arduino como el cerebro.El cerebro cen
Componentes:Galileo de IntelLDRPotenciómetro deprotoboardAmplificador operacionalTransistor DarlingtonMotor de la c.c.resistenciaPaso 1: trabajoEl proyecto es para el control de un robot usando Intel Galileo que toma una señal de un resistor dependie
El circuito se utiliza para el control de un robot aumentando o reduciendo los componentes de la luz intensity.circuit,medidor de potencial, arduino uno, amplificador operacional, npn transistor de darlington, motor, resistor dependiente de luz Ldr,P
Nota:antes de decidir construir este robot, por favor lea mi Instructable más reciente en la construcción de un robot SpurtBot Sombra Corredora. El nuevo diseño utiliza una sin soldadura breadboard, para después generar el robot, puedes experimentar
El luz siguiente robot es una máquina móvil que es capaz de detectar y después la fuente de luz en el camino de viaje. Se desarrolla sin la ayuda de un microcontrolador para proporcionar conexiones más fácil y comprensión del circuito. Requiere menor

")











