Paso 11: Toques finales



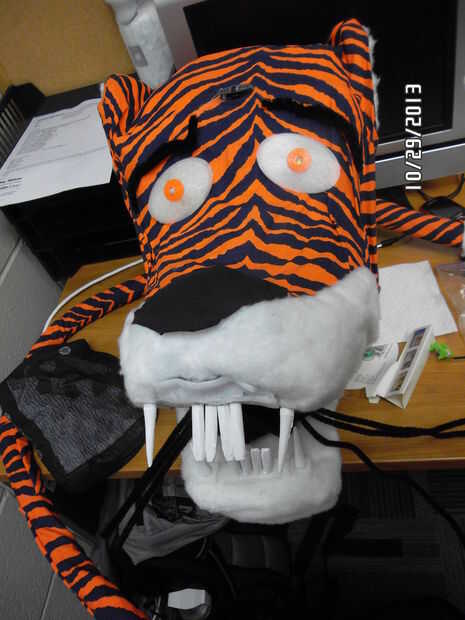

Finalmente ha hecho a los pasos finales de la cabeza; montaje de los littleBits y arduino. En primer lugar, orificio de 1/2 "x 1" a través de la tela y endurecido papel maché en el centro de la frente para montar el servo. Utilice tijeras para meter dos agujeros en la cara del tigre para alimentar los LEDs larga (2), como globos oculares. Los orificios deben ser que del mismo tamaño de los agujeros en el 3-d impresos globos oculares. Pegue cada globo ocular sobre los dos orificios de LED en la cabeza. Los LEDs larga será las pupilas de los ojos. Con los cortadores de alambre, corte un agujero lo suficientemente grande como para alimentar el cable poco a través de la boca a la sección principal para conectar el primer circuito de littleBits. Corte 3" por 3" tira de cartón para montar el arduino/waveshield. Use una atadura para montar el arduino a la cartulina. Montaje de la segunda mitad del circuito en el interior de la frente entre los LEDs larga y el orificio de servo con ataduras de cremallera. Alimentar el throuh servo el servo agujero y montar directamente en la frente. Con ataduras de cremallera, Monte el arduino al lado de la segunda mitad del circuito para mantener una conexión estable con la broca de LED brillante. Tomar dos pipecleaners y girar para formar la forma de una ceja. Usando un alfiler, Monte la ceja a la cabeza. El pin servirá como punto de pivote de la ceja levantar hacia arriba y hacia abajo. Conecte la ceja y el brazo del servo usando sedal o thead. Debe ser lo suficientemente apretada como para permitir la suficiente elevación del brazo del servo. Completar el mismo proceso para la segunda ceja. A continuación, doble a la tela roja a la forma de una lengua y pegar las aletas hacia abajo. Añadir los dientes usando la cinta doble cara delante de la boca. Por último, pero no menos importante son los bigotes. Con cinta de enmascarar, cinta de 3 pipecleaners a cada vibración del motor y fijar a los lados de la boca con tela blanca.













